Google Summer of Code (GSoC)
The Google Summer of Code (GSoC), is an international annual program, first held from May to August 2005, in which Google awards stipends, which depends on the purchasing power parity of the country the student’s university belongs to, to all students who successfully complete a requested free and open-source software coding project during the summer. The program is open to university students aged 18 or over.
During Google Summer of Code, participating contributors are paired with mentors from open source organizations, gaining exposure to real-world software development techniques. Contributors will learn from experienced open source developers while writing code for real-world projects! A small stipend is provided as an incentive.

Why contribute?
Aerostack2 is a ROS 2 based, open-source multipurpose framework designed to create autonomous multi-aerial-robot systems in an easy and powerful way. The project has been under development since 2016, starting with the first version, Aerostack, which can be found here: Aerostack Wiki. Since 2021, work has been focused on the development of Aerostack2.
The Aerostack2 environment is open source and free of charge, which facilitates universal access to this technology by autonomous drone developers. It is offered with a BSD-3-Clause license that allows free distribution and modification of the software.
Our organization is a young and dynamic group, dedicated to pushing the boundaries of aerial robotics through collaboration and innovation. We are focused on unifying the development of autonomous aerial robotics systems, aiming to establish Aerostack2 as a leading open-source framework that developers and researchers can rely on for their projects.
Nowadays, Aerostack2 has accumulated more than 2,000 commits and 500 pull requests, contributed by more than 20 international collaborators.
We have also actively engaged with the community to promote and improve Aerostack2, participating in working groups such as:
Furthermore, Aerostack2 has been presented at international conferences:
If you are interested in ROS 2, aerial robotics, and open-source software development, we invite you to join us in this exciting journey!
Ideas List for GSoC 2026
Below you will find the list of the different project ideas that we are proposing for Google Summer of Code 2026.
Project #1: Rerun-Based Visualization Integration for Aerostack2
This project aims to extend the visualization capabilities of the Aerostack2 framework by integrating Rerun (Rerun.io) as a new visualization backend for monitoring, debugging, and analysis.
The project will build upon the existing visualization infrastructure of Aerostack2, including the current custom RViz2 visualization tools and plugins, which are used to display drone states, trajectories, sensor data, and mission execution. Based on these existing concepts, similar visualization tools will be developed using Rerun, while taking advantage of its improved support for temporal data visualization, data replay, and multi-modal analysis.
All visualization tools developed in this project will support multi-drone and swarm scenarios, ensuring scalability beyond single-vehicle use cases and enabling comprehensive visualization of coordinated aerial systems.

- Skills Required/Preferred
ROS 2, Python and C++
- Difficulty Level
Medium
- Expected Outcome
To improve the usability and debugging experience for developers using Aerostack2.
- Expected Size of the Project
Medium (175h)
- Mentors
Álvaro Gaona (alvgaona AT gmail.com), Rodrigo Da Silva Gómez (rodrigods2001 AT gmail.com), Francisco Anguita (fjanguita014 AT gmail.com), David Perez-Saura (perezsaura.david AT gmail.com)
Project #2: RQT Keyboard Teleoperation & Alphanumeric View
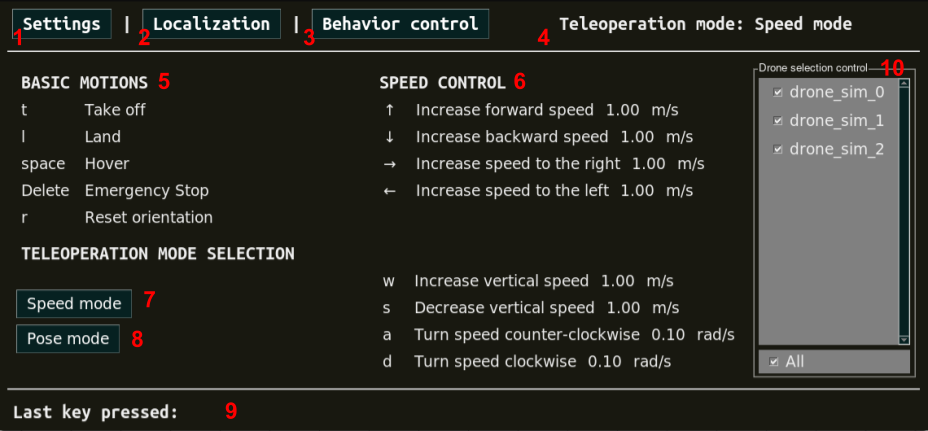
This project aims to improve and extend the user interface capabilities of the Aerostack2 aerial robotics framework. To achieve this, we plan to replace and extend existing tools such as the Keyboard Teleoperation and the Alphanumeric Viewer, integrating the new tools as RQT plugins.
The already implemented Keyboard Teleoperation uses the PySimpleGUI library and functions as a simple ground station to control drones with both position and speed commands. It also allows pausing, resuming, and canceling Aerostack2 behaviors. The goal is to completely remake this tool using RQT, discarding its PySimpleGUI counterpart.
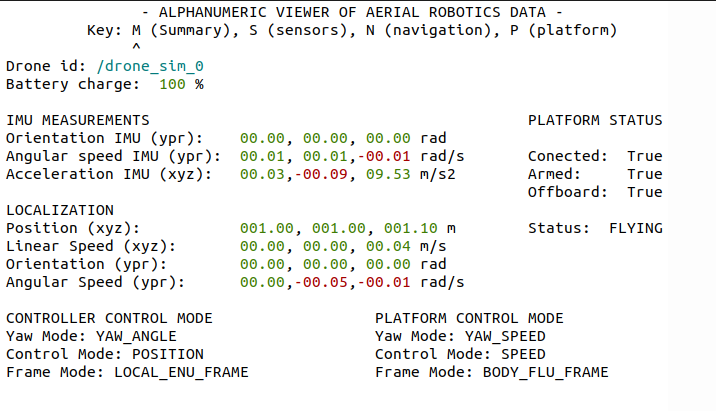
The other tool is the Alphanumeric Viewer. This tool currently prints information in ASCII format in the console. We do not intend to discard this tool, as it remains useful for its simplicity and the ability to view information via terminal when using SSH to connect to a remote onboard computer. Instead, the new tool to be developed should serve as a more visually appealing and user-friendly addition to monitor the drone’s state.
- Skills Required/Preferred
RQT, ROS 2, Python (or C++)
- Difficulty Level
Medium
- Expected Outcome
Replace the current user teleoperation interface with a RQT counterpart, together with adding a new RQT alphanumeric viewer.
- Expected Size of the Project
Medium (175h)
- Mentors
Rodrigo Da Silva Gómez (rodrigods2001 AT gmail.com), Guillermo GP-Lenza (guillermolenza AT gmail.com), Pedro Arias-Perez (pedro.arias.perez AT uvigo.gal), Javier Melero Deza (javier.mdeza AT gmail.com)
Project #3: Migration of current ROS 2 Nodes to Lifecycle Nodes in Aerostack2
This project aims to migrate Aerostack2 existing ROS 2 nodes to lifecycle nodes. Lifecycle nodes provide a structured way to manage the state of a node, allowing better control over initialization, execution, and shutdown processes.
The work will involve refactoring the current nodes to adopt the managed lifecycle model, implementing state transitions to optimize resource usage, and ensuring seamless integration with existing aerostack2 components. Additionally, performance evaluations will be conducted to validate the benefits of this migration.
- Skills Required/Preferred
ROS 2, C++, Python
- Difficulty Level
Medium
- Expected Outcome
One or two nodes migrated and working in Aerostack2
- Expected Size of the Project
Medium (175h)
- Mentors
Francisco Anguita (fjanguita014 AT gmail.com), Pedro Arias-Perez (pedro.arias.perez AT uvigo.gal), Miguel Fernandez-Cortizas (miferco97 AT gmail.com),
Project #4: System Integration Tests and Continuous Integration
This project focuses on the implementation of Integration Test to the CI pipeline. An Aerostack2-based system is expected to run drone missions that produce expected outputs. Integration tests allow to check the different Aerostack2 modules keep working together before contributions are made.
Aerostack2 uses Github Workflows to make sure Aerostack2 builds and passes all tests when a Pull Request to the project is opened. ROS 2 launch_testing package can be used to add tasks to the Continuous Integration workflow and verify the functionalities of an Aerostack2 system as a whole.
- Skills Required/Preferred
ROS 2, C++, Python, Github Workflows, Testing libraries
- Difficulty Level
Medium
- Expected Outcome
Extension of the Aerostack2 CI pipeline to include system testing
- Expected Size of the Project
Medium (175h)
- Mentors
Miguel Fernandez-Cortizas (miferco97 AT gmail.com), Francisco Anguita (fjanguita014 AT gmail.com), Rafael Perez-Segui (rafa.perez.s98 AT gmail.com)
Project #5: Development of a Project Creation Tool for Aerostack2
This project aims to develop a tool that simplifies the creation and management of projects in Aerostack2. In Aerostack2, a “project” consists of a structured set of configurations, launch files, and assets designed to address a specific problem or application. The tool will provide an intuitive interface to generate and organize these elements, reducing setup time and improving usability for developers and researchers. It will include functionalities for defining project parameters, selecting relevant modules, and automatically generating necessary files developing new script utils like get_drones.py. By streamlining the process of configuring Aerostack2 for different applications, this tool will enhance productivity and make the framework more accessible to a broader range of users.
- Skills Required/Preferred
Python, QT, Tmux, Tmuxinator, Bash scripting
- Difficulty Level
Medium
- Expected Outcome
Project Creation Tool and script utils
- Expected Size of the Project
Medium (175h)
- Mentors
Guillermo GP-Lenza (guillermolenza AT gmail.com), Rafael Perez-Segui (rafa.perez.s98 AT gmail.com), Álvaro Gaona (alvgaona AT gmail.com), Javier Melero Deza (javier.mdeza AT gmail.com)
Project #6: Behavior Client Implementation for C++
This project seeks to implement a Behavior Client that allows users to design missions using C++.
Aerostack2 uses behavior-based logic for mission definition and control. Currently, Aerostack2 has a Python API with modules that wrap around the different behaviors and implements functions that can be used in a Python script to make calls to behaviors like a simple go_to or a path_follower. A similar Behavior Client allows easier and faster mission definition using C++.

- Skills Required/Preferred
ROS 2, C++
- Difficulty Level
Medium
- Expected Outcome
C++ implementation of a Behavior Client for mission definition
- Expected Size of the Project
Medium (175h)
- Mentors
Rafael Perez-Segui (rafa.perez.s98 AT gmail.com), Miguel Fernandez-Cortizas (miferco97 AT gmail.com), Francisco Anguita (fjanguita014 AT gmail.com)
Application instructions for GSoC 2026
We encourage you to apply for Google Summer of Code 2026 with any of the projects listed above. If you have any questions, please reach out to the mentor(s) listed for the project you are interested in or contact us at aerostack2 AT gmail.com. We are looking for enthusiastic students who are passionated and willing to learn and contribute to open-source projects.
To apply, follow the instructions below:
Basic Requirements
Check that you meet the eligibility requirements for the program. Check the GSoC website for more information.
Basic Git experience.
Basic experience working with C++ and/or Python.
Warm-up Task
Warning
This warm-up task is mandatory for all the projects.
In order to apply for any of the projects, you must complete a simple warm-up for familiarizing yourself with the Aerostack2 framework. The warm-up task consists of the following steps:
Setup an environment with ROS 2 Humble and Aerostack2. You can follow the instructions in the Aerostack2 Wiki.
Follow the Simple Gazebo Simulation example in the Aerostack2 Wiki.
Fork the project repository and modify the
mission.pyfile to make the drone move in a hexagonal trajectory. You can try complex trajectories if you want.Upload the modified code to your repo and submit the link to the repository in the application form.
Note
If you encounter any issues related to this task, please use Aerostack2 discussions or Aerostack2 issues.
Application Form
After doing the warm-up tasks, fill this web form with your information and challenge results. Then you are invited to ask the project mentors about the project details.
Note
Application form: GSoC 2026 Application Form
Consider answering the following questions in the resume submitted to the application form.
Contact Details
Name and surname:
Country:
Email:
Public repository/ies:
Personal blog (optional):
Twitter/Identica/LinkedIn/others:
Timeline
Split your project idea into smaller tasks.
Quantify the time you think each task needs.
Draw a tentative project plan (timeline) including the dates covering the entire GSoC period.
Don’t forget to include the days in which you do not plan to code due to exams, holidays, or other commitments.
Do you understand this is a serious commitment, equivalent to a full-time paid summer internship or summer job?
Do you have any known time conflicts during the official coding period?
Studies
What is your school and degree?
Would your application contribute to your ongoing studies/degree? If so, how?
Programming Background
Computing experience: operating systems you use on a daily basis, known programming languages, hardware, etc.
Robot or Computer Vision programming experience:
Other software programming experience:
GSoC Participation
Have you participated to GSoC before?
How many times, which year, which project?
Have you applied but were not selected? When?
Have you submitted/will you submit another proposal for GSoC 2026 to a different org?
How to increase your chances of being selected in GSoC-2026
If you put yourself in the shoes of the mentor that should select the student, you’ll immediately realize that there are some behaviors that are usually rewarded. Here’s some examples.
Be proactive: Mentors are more likely to select students that openly discuss the existing ideas and / or propose their own. It is a bad idea to just submit your idea only in the Google web site without discussing it, because it won’t be noticed.
Demonstrate your skills: Consider that mentors are being contacted by several students that apply for the same project. A way to show that you are the best candidate, is to demonstrate that you are familiar with the software and you can code. How? Browse the bug tracker (issues in github of Aerostack2), fix some bugs and propose your patch submitting your PullRequest, and/or ask mentors to challenge you! Moreover, bug fixes are a great way to get familiar with the code.
Demonstrate your intention to stay: Students that are likely to disappear after GSoC are less likely to be selected. This is because there is no point in developing something that won’t be maintained. And moreover, one scope of GSoC is to bring new developers to the community.
Acknowledgements
We would like to thank JdeRobot for the support and the inspiration to participate in GSoC 2026.