Alphanumeric Viewer
Introduction
Aerostack2’s alphanumeric viewer interface consists on a window with multiple tabs that shows different data regarding the state of the uav.
Interface launch
Example of keyboard teleoperation tool launch command:
ros2 run as2_alphanumeric_viewer as2_alphanumeric_viewer_node \
--ros-args -r __ns:=/drone_sim_0
This will open alphanumeric viewer interface for drone with namespace: drone_sim_0.
Instructions
When the previous launch command is executed, a window like the following will open:
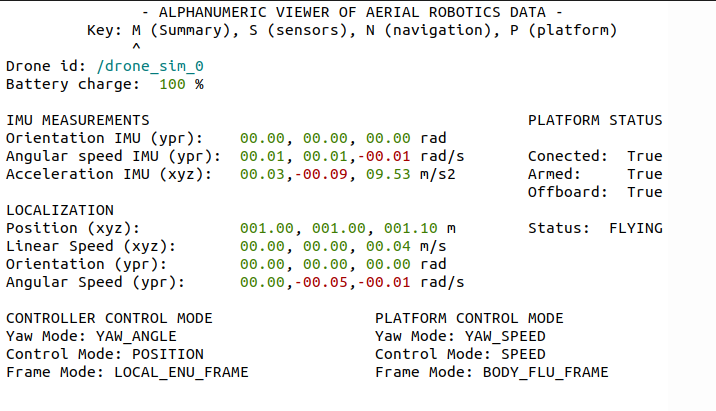
Alphanumeric viewer summary window.
Different tabs can be displayed when pressing the correspondent key. Each of the tabs shows different information for different purposes.
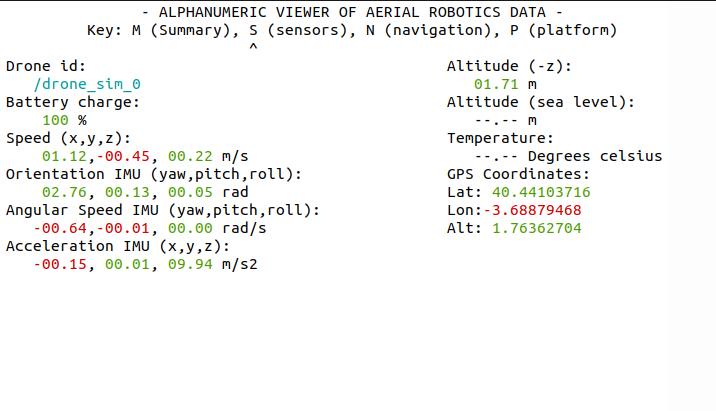
Alphanumeric viewer sensors window.
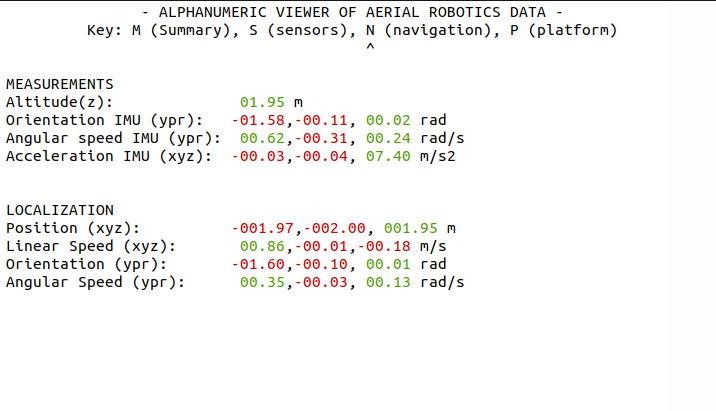
Alphanumeric viewer navigation window.
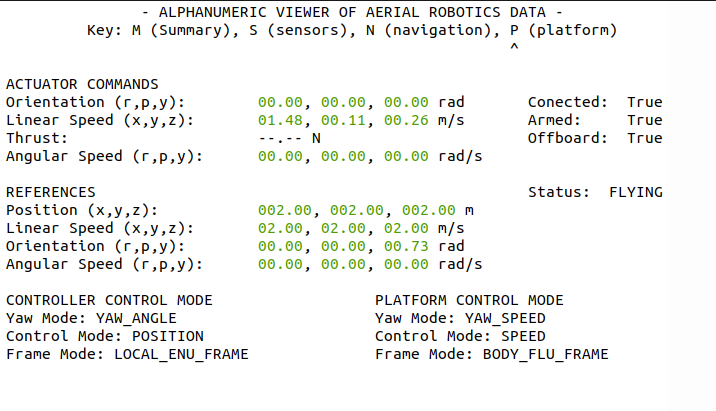
Alphanumeric viewer platform window.
Those tabs can be summarized in the following table:
Key |
Name |
Information displayed |
|---|---|---|
M-m |
Summary tab |
Shows all different but what we believe is the most important information to show
most of the times. It displays information about the IMU measurements, localization,
control modes for each the controller and the platform, aswell as the platform status.
|
S-s |
Sensors tab |
Shows information regarding the sensor measurements with a clearer layout. |
N-n |
Navigation tab |
Shows information regarding self localization with a clearer layout. |
P-p |
Platform tab |
Shows information regarding platform and controller with a clearer layout. |