aerostack2
-
struct Acro_command
-
class AcroBridge : public rclcpp::Node
Public Functions
-
AcroBridge()
Private Functions
-
void acroCallback(const as2_msgs::msg::Acro &acro_msg)
Private Members
-
AcroBridge()
-
class ACROMotion : public as2::motionReferenceHandlers::BasicMotionReferenceHandler
- #include <acro_motion.hpp>
The ACROMotion class is a motion reference handler that moves the robot to a given acro.
Public Functions
-
explicit ACROMotion(as2::Node *node_ptr, const std::string &ns = "")
ACROMotion Constructor.
- Parameters:
node – as2::Node pointer.
-
inline ~ACROMotion()
ACROMotion Destructor.
-
bool sendACRO(const as2_msgs::msg::Thrust &thrust, const geometry_msgs::msg::Vector3 &angular_rates)
sendACRO sends a acro to the robot.
Using the time stamp and frame id from the thrust message. Frame id should be base_link.
- Parameters:
thrust – as2_msgs::msg::Thrust to be sent.
angular_rates – geometry_msgs::msg::Vector3 to be sent.
- Returns:
true if the command was sent successfully, false otherwise.
-
explicit ACROMotion(as2::Node *node_ptr, const std::string &ns = "")
-
class AerialPlatform : public as2::Node
- #include <aerial_platform.hpp>
Base class for all Aerial platforms. It provides the basic functionality for the platform. It is responsible for handling the platform state machine and the platform status. It also handles the command subscriptions and the basic platform services.
Subclassed by as2_platform_multirotor_simulator::MultirotorSimulatorPlatform, gazebo_platform::GazeboPlatform
Public Functions
-
explicit AerialPlatform(const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
Construct a new Aerial Platform object, with default parameters.
-
AerialPlatform(const std::string &ns, const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
Construct a new Aerial Platform object, with default parameters.
-
inline ~AerialPlatform()
-
virtual void configureSensors() = 0
Configures the platform sensors.
-
virtual bool ownSendCommand() = 0
Handles how a command must be sended in the concrete platform.
- Returns:
true command is sended successfully.
- Returns:
false command is not sended.
-
virtual bool ownSetArmingState(bool state) = 0
Handles how arming state has to be settled in the concrete platform.
- Parameters:
state – true for arming the platform, false to disarm.
- Returns:
true Arming state is settled successfully.
- Returns:
false Arming state is not settled.
-
virtual bool ownSetOffboardControl(bool offboard) = 0
Handles how offboard mode has to be settled in the concrete platform.
- Parameters:
offboard – true if offboard mode is enabled.
- Returns:
true Offboard mode is settled successfully.
- Returns:
false Offboard mode is not settled.
-
virtual bool ownSetPlatformControlMode(const as2_msgs::msg::ControlMode &msg) = 0
Handles how the control mode has to be settled in the concrete platform.
- Parameters:
control_mode – as2_msgs::msg::PlatformControlMode with the new control mode.
- Returns:
true Control mode is settled successfully.
- Returns:
false Control mode is not settled.
-
inline virtual bool ownTakeoff()
Handles the platform takeoff command.
- Returns:
true Takeoff command is sended successfully.
- Returns:
false Takeoff command is not sended.
-
inline virtual bool ownLand()
Handles the platform landing command.
- Returns:
true Landing command is sended successfully.
- Returns:
false Landing command is not sended.
-
virtual void ownKillSwitch() = 0
Handles the platform emergency kill switch command. This means stop the motors inmediately, this cannot be reversed. USE WITH CAUTION.
-
virtual void ownStopPlatform() = 0
Handles the platform emergency stop command. STOP means to hover as best as possible. This hover is different from the hover in the platform control mode. And when it is activated the platform will stop hearing commands from AS2. USE WITH CAUTION.
-
inline bool handleStateMachineEvent(const as2_msgs::msg::PlatformStateMachineEvent &event)
Set the State Machine Event object.
- Parameters:
event – Event to
- Returns:
true
- Returns:
false
-
inline bool handleStateMachineEvent(const int8_t &event)
-
inline bool getArmingState() const
Get whether the platform is armed or not.
- Returns:
true Armed
- Returns:
false Disarmed
-
inline bool getConnectedStatus() const
Get wheter the connection is established or not.
- Returns:
true Connection active
- Returns:
false Connection not active
-
inline bool getOffboardMode() const
Get whether offboard mode is active or not.
- Returns:
true Offboard mode enabled
- Returns:
false Offboard mode disabled
-
inline as2_msgs::msg::ControlMode &getControlMode()
Get current platform control mode.
- Returns:
as2_msgs::msg::PlatformControlMode current platform control mode
-
inline bool isControlModeSettled() const
Get whether a control mode is active or not.
- Returns:
true Control mode set and valid
- Returns:
false Control mode unset
Protected Functions
-
bool setArmingState(bool state)
Set the arm state of the platform.
- Parameters:
state – True to arm the platform, false to disarm it.
- Returns:
true Armimg state setted successfully.
- Returns:
false Armimg state not setted successfully.
-
bool setOffboardControl(bool offboard)
Set the offboard control mode.
- Parameters:
offboard – True if the offboard control mode is enabled.
- Returns:
true if the offboard control mode is setted properly
- Returns:
false if the offboard control mode could not be setted.
-
bool setPlatformControlMode(const as2_msgs::msg::ControlMode &msg)
Set the control mode of the platform.
- Parameters:
msg – as2_msgs::msg::ControlMode message with the new control mode desired.
- Returns:
true If the control mode is set properly.
- Returns:
false If the control mode could not be set properly.
-
bool takeoff()
Handles the platform takeoff command.
- Returns:
true Takeoff command is sended successfully.
- Returns:
false Takeoff command is not sended.
-
bool land()
Handles the platform landing command.
- Returns:
true Landing command is sended successfully.
- Returns:
false Landing command is not sended.
-
void alertEvent(const as2_msgs::msg::AlertEvent &msg)
Handles the platform emergency event.
- Parameters:
msg – as2_msgs::msg::AlertEvent message with the emergency event.
-
virtual void sendCommand()
Send command to the platform.
-
void resetPlatform()
Reset the platform to its initial state. This is primarily used for reseting simulation environments. or at the initialization of the platform.
-
void resetActuatorCommandMsgs()
Protected Attributes
-
float cmd_freq_
-
float info_freq_
-
as2_msgs::msg::TrajectorySetpoints command_trajectory_msg_
-
geometry_msgs::msg::PoseStamped command_pose_msg_
-
geometry_msgs::msg::TwistStamped command_twist_msg_
-
as2_msgs::msg::Thrust command_thrust_msg_
-
as2_msgs::msg::PlatformInfo platform_info_msg_
-
bool has_new_references_ = false
Private Functions
-
void initialize()
-
inline void publishPlatformInfo()
Publishes the platform info message.
Set Aircraft Control Mode Service Callback.
- Parameters:
request –
response –
Set Aircraft Arming State Service Callback.
- Parameters:
request –
response –
Set Aircraft Offboard Mode Service Callback.
- Parameters:
request –
response –
Takeoff Service Callback.
- Parameters:
request –
response –
Land Service Callback.
- Parameters:
request –
response –
get list of available Control Modes Service Callback
- Parameters:
request –
response –
-
explicit AerialPlatform(const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
-
class AlphanumericViewer : public as2::Node
Public Types
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
Public Functions
-
AlphanumericViewer()
-
void run()
-
void setupNode()
-
void printSummaryMenu()
-
void printSensorMenu()
-
void printPlatformMenu()
-
void printStream(double var, bool aux)
-
void printStream3(float var, bool aux)
-
void printStream(float var, bool aux)
-
void printSummaryValues()
-
void printSensorValues()
-
void printPlatformValues()
-
void printBattery()
-
void printQuadrotorState()
-
void printControlModeInYaw()
-
void printControlModeInControl()
-
void printControlModeInFrame()
-
void printControlModeOutYaw()
-
void printControlModeOutControl()
-
void printControlModeOutFrame()
-
void printPlatformStatus(int line)
-
void clearValues()
-
virtual CallbackReturn on_configure(const rclcpp_lifecycle::State&) override
Callback for the configure state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_deactivate(const rclcpp_lifecycle::State&) override
Callback for the deactivate state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_shutdown(const rclcpp_lifecycle::State&) override
Callback for the shutdown state.
- Parameters:
state –
- Returns:
CallbackReturn
Private Functions
Private Members
-
geometry_msgs::msg::PoseStamped self_localization_pose_
-
geometry_msgs::msg::TwistStamped self_localization_twist_
-
sensor_msgs::msg::BatteryState battery_status_
-
sensor_msgs::msg::Imu imu_
-
as2_msgs::msg::PlatformInfo platform_info_
-
geometry_msgs::msg::PoseStamped actuator_pose_
-
as2_msgs::msg::Thrust actuator_thrust_
-
geometry_msgs::msg::TwistStamped actuator_twist_
-
as2_msgs::msg::ControllerInfo controller_info_
-
geometry_msgs::msg::PoseStamped reference_pose_
-
geometry_msgs::msg::TwistStamped reference_twist_
-
sensor_msgs::msg::NavSatFix gps_
-
int battery_mode_ = 0
-
bool battery_aux = false
-
bool altitude_aux = false
-
bool altitude_sea_level_aux = false
-
bool ground_speed_aux = false
-
bool imu_aux = false
-
bool temperature_aux = false
-
bool platform_info_aux = false
-
bool current_speed_reference_aux = false
-
bool current_pose_reference_aux = false
-
bool current_trajectory_reference_aux = false
-
bool actuator_command_pose_aux = false
-
bool actuator_command_twist_aux = false
-
bool actuator_command_thrust_aux = false
-
bool current_pose_aux = false
-
bool current_speed_aux = false
-
bool controller_info_aux = false
-
bool gps_aux = false
-
bool thrust_aux = false
-
int last_received_yaw_mode
-
int last_received_control_mode
-
int last_received_reference_frame
-
char command = 0
-
int window = 0
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
-
class ArmService : public as2_behavior_tree::BtServiceNode<std_srvs::srv::SetBool>
-
class As2ExternalObjectToTf : public as2::Node
Public Types
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
Public Functions
-
As2ExternalObjectToTf()
-
void setupNode()
-
void cleanupNode()
-
void run()
-
virtual CallbackReturn on_configure(const rclcpp_lifecycle::State&) override
Callback for the configure state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_deactivate(const rclcpp_lifecycle::State&) override
Callback for the deactivate state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_shutdown(const rclcpp_lifecycle::State&) override
Callback for the shutdown state.
- Parameters:
state –
- Returns:
CallbackReturn
Private Functions
-
void setupGPS()
-
geometry_msgs::msg::Quaternion azimuthPitchToQuaternion(const float azimuth, const float pitch)
Private Members
-
bool origin_set_ = false
-
bool use_sim_time = false
-
geographic_msgs::msg::GeoPoint::UniquePtr origin_
-
std::vector<rclcpp::Subscription<geometry_msgs::msg::PoseStamped>::SharedPtr> objects_subscriptions_
-
std::unique_ptr<as2::gps::GpsHandler> gps_handler
-
std::map<std::string, gps_object> gps_poses
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
-
class As2MultirotorSimulatorInterface
Public Functions
-
inline ~As2MultirotorSimulatorInterface()
-
template<typename T>
inline void getParam(const std::string ¶m_name, T ¶m_value, bool use_default = false) Get parameter from the parameter server.
- Parameters:
param_name – Name of the parameter
param_value – Value of the parameter
use_default – Use default value if parameter is not found
Convert simulator data to odometry message.
- Parameters:
kinematics – Kinematics data
odom – Return odometry message
current_time – Current time
-
void convertToGroundTruth(const Kinematics &kinematics, geometry_msgs::msg::PoseStamped &ground_truth_pose, geometry_msgs::msg::TwistStamped &ground_truth_twist, const builtin_interfaces::msg::Time ¤t_time)
Convert simulator data to ground truth message.
- Parameters:
kinematics – Kinematics data
ground_truth_pose – Return ground truth pose message
ground_truth_twist – Return ground truth twist message
current_time – Current time
-
bool processCommand(geometry_msgs::msg::PoseStamped &pose_command)
-
bool processCommand(geometry_msgs::msg::TwistStamped &twist_command)
-
bool processCommand(as2_msgs::msg::TrajectorySetpoints trajectory_command)
Private Types
-
using Simulator = multirotor::Simulator<double, 4>
-
using SimulatorParams = multirotor::SimulatorParams<double, 4>
-
using Kinematics = multirotor::state::internal::Kinematics<double>
-
inline ~As2MultirotorSimulatorInterface()
-
class AStarPlanner
Public Functions
-
inline AStarPlanner()
-
inline void setOcuppancyGrid(const cv::Mat &mat)
-
inline void setOriginPoint(const cv::Point2i &point)
-
inline void setGoal(const cv::Point2i &point)
Private Functions
-
inline AStarPlanner()
-
class AStarSearcher : public GraphSearcher<cv::Mat>
Public Functions
Update the occupancy grid.
- Parameters:
occ_grid – occupancy grid
drone_pose – drone pose in cell coordinates
safety_distance – safety distance in meters
-
cv::Point2i cellToPixel(Point2i cell, int rows, int cols)
Convert cell coordinates to pixel coordinates.
- Parameters:
cell – cell coordinates
rows – number of rows
cols – number of columns
-
cv::Point2i cellToPixel(Point2i cell, cv::Mat map)
Convert cell coordinates to pixel coordinates.
- Parameters:
cell – cell coordinates
map – map
Convert cell coordinates to pixel coordinates.
- Parameters:
cell – cell coordinates
map_info – map metadata
Convert pixel coordinates to cell coordinates.
- Parameters:
pixel – pixel coordinates
map_info – map metadata
Occupancy grid to binary image
- Parameters:
occ_grid – occupancy grid
thresh – threshold value
unknown_as_free – if true, unknown cells are considered free
- Returns:
: binary image
-
nav_msgs::msg::OccupancyGrid imgToGrid(const cv::Mat img, const std_msgs::msg::Header &header, double grid_resolution)
Binary image to occupancy grid
- Parameters:
img – binary image
header – header of the occupancy grid
grid_resolution – resolution of the occupancy grid
- Returns:
: occupancy grid
Protected Functions
Protected Attributes
-
bool use_heuristic_ = true
-
template<class MessageT>
class BasicBehavior : public as2::Node, public as2::Node Public Types
-
using GoalHandleAction = rclcpp_action::ServerGoalHandle<MessageT>
Public Functions
-
inline explicit BasicBehavior(const std::string &name)
-
virtual rclcpp_action::GoalResponse onAccepted(const std::shared_ptr<const typename MessageT::Goal> goal) = 0
-
virtual rclcpp_action::CancelResponse onCancel(const std::shared_ptr<GoalHandleAction> goal_handle) = 0
-
virtual void onExecute(const std::shared_ptr<GoalHandleAction> goal_handle) = 0
Private Functions
-
inline rclcpp_action::GoalResponse handleGoal(const rclcpp_action::GoalUUID &uuid, std::shared_ptr<const typename MessageT::Goal> goal)
-
inline rclcpp_action::CancelResponse handleCancel(const std::shared_ptr<GoalHandleAction> goal_handle)
-
inline void handleAccepted(const std::shared_ptr<GoalHandleAction> goal_handle)
-
using GoalHandleAction = rclcpp_action::ServerGoalHandle<MessageT>
-
class BasicMotionReferenceHandler
Subclassed by as2::motionReferenceHandlers::ACROMotion, as2::motionReferenceHandlers::HoverMotion, as2::motionReferenceHandlers::PositionMotion, as2::motionReferenceHandlers::SpeedInAPlaneMotion, as2::motionReferenceHandlers::SpeedMotion, as2::motionReferenceHandlers::TrajectoryMotion
Public Functions
-
~BasicMotionReferenceHandler()
Protected Functions
-
bool sendThrustCommand()
-
bool sendPoseCommand()
-
bool sendTwistCommand()
-
bool sendTrajectoryCommand()
-
bool checkMode()
Protected Attributes
-
as2_msgs::msg::TrajectorySetpoints command_trajectory_msg_
-
geometry_msgs::msg::PoseStamped command_pose_msg_
-
geometry_msgs::msg::TwistStamped command_twist_msg_
-
as2_msgs::msg::Thrust command_thrust_msg_
-
as2_msgs::msg::ControlMode desired_control_mode_
Private Functions
-
bool setMode(const as2_msgs::msg::ControlMode &mode)
Private Static Attributes
-
static int number_of_instances_ = 0
-
static rclcpp::Subscription<as2_msgs::msg::ControllerInfo>::SharedPtr controller_info_sub_ = nullptr
-
static as2_msgs::msg::ControlMode current_mode_ = as2_msgs::msg::ControlMode()
-
~BasicMotionReferenceHandler()
-
template<typename actionT>
class BehaviorServer : public as2::Node Public Types
-
using BehaviorStatus = as2_msgs::msg::BehaviorStatus
Public Functions
-
void register_action()
-
BehaviorServer(const std::string &name, const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
-
inline virtual void on_execution_end(const ExecutionStatus &state)
-
inline void timer_callback()
-
void publish_behavior_status()
Public Members
-
std::shared_ptr<GoalHandleAction> goal_handle_
-
as2_msgs::msg::BehaviorStatus behavior_status_
Private Functions
-
void register_service_servers()
-
void register_publishers()
-
void register_timers()
-
void register_run_timer()
-
void cleanup_run_timer(const ExecutionStatus &status)
Private Members
-
rclcpp::Service<modify_srv>::SharedPtr modify_srv_
-
rclcpp::Publisher<feedback_msg>::SharedPtr feedback_pub_
-
rclcpp::Publisher<goal_status_msg>::SharedPtr goal_status_pub_
-
rclcpp::Publisher<BehaviorStatus>::SharedPtr behavior_status_pub_
-
using BehaviorStatus = as2_msgs::msg::BehaviorStatus
-
template<class ActionT>
class BtActionNode : public BT::ActionNodeBase - #include <bt_action_node.hpp>
Abstract class representing an action based BT node.
- Template Parameters:
ActionT – Type of action
Public Functions
-
inline BtActionNode(const std::string &xml_tag_name, const std::string &action_name, const BT::NodeConfiguration &conf)
A as2_behavior_tree::BtActionNode constructor.
- Parameters:
xml_tag_name – Name for the XML tag for this node
action_name – Action name this node creates a client for
conf – BT node configuration
-
BtActionNode() = delete
-
inline virtual ~BtActionNode()
-
inline void createActionClient(const std::string &action_name)
Create instance of an action client.
- Parameters:
action_name – Action name to create client for
-
inline virtual void on_tick()
Function to perform some user-defined operation on tick Could do dynamic checks, such as getting updates to values on the blackboard.
Function to perform some user-defined operation after a timeout waiting for a result that hasn’t been received yet. Also provides access to the latest feedback message from the action server. Feedback will be nullptr in subsequent calls to this function if no new feedback is received while waiting for a result.
- Parameters:
feedback – shared_ptr to latest feedback message, nullptr if no new feedback was received
-
inline virtual BT::NodeStatus on_success()
Function to perform some user-defined operation upon successful completion of the action. Could put a value on the blackboard.
- Returns:
BT::NodeStatus Returns SUCCESS by default, user may override return another value
-
inline virtual BT::NodeStatus on_aborted()
Function to perform some user-defined operation whe the action is aborted.
- Returns:
BT::NodeStatus Returns FAILURE by default, user may override return another value
-
inline virtual BT::NodeStatus on_cancelled()
Function to perform some user-defined operation when the action is cancelled.
- Returns:
BT::NodeStatus Returns SUCCESS by default, user may override return another value
-
inline BT::NodeStatus tick() override
The main override required by a BT action.
- Returns:
BT::NodeStatus Status of tick execution
-
inline void halt() override
The other (optional) override required by a BT action. In this case, we make sure to cancel the ROS2 action if it is still running.
Public Static Functions
-
static inline BT::PortsList providedBasicPorts(BT::PortsList addition)
Any subclass of BtActionNode that accepts parameters must provide a providedPorts method and call providedBasicPorts in it.
- Parameters:
addition – Additional ports to add to BT port list
- Returns:
BT::PortsList Containing basic ports along with node-specific ports
Protected Functions
-
inline bool should_cancel_goal()
Function to check if current goal should be cancelled.
- Returns:
bool True if current goal should be cancelled, false otherwise
-
inline void send_new_goal()
Function to send new goal to action server.
-
inline void result_callback(const typename rclcpp_action::ClientGoalHandle<ActionT>::WrappedResult &result)
-
inline bool is_future_goal_handle_complete(std::chrono::milliseconds &elapsed)
Function to check if the action server acknowledged a new goal.
- Parameters:
elapsed – Duration since the last goal was sent and future goal handle has not completed. After waiting for the future to complete, this value is incremented with the timeout value.
- Returns:
boolean True if future_goal_handle_ returns SUCCESS, False otherwise
-
inline void increment_recovery_count()
Function to increment recovery count on blackboard if this node wraps a recovery.
-
template<class ServiceT>
class BtServiceNode : public BT::ActionNodeBase - #include <bt_service_node.hpp>
Abstract class representing a service based BT node.
- Template Parameters:
ServiceT – Type of service
Public Functions
-
inline BtServiceNode(const std::string &service_node_name, const BT::NodeConfiguration &conf)
A as2_behavior_tree::BtServiceNode constructor.
- Parameters:
service_node_name – Service name this node creates a client for
conf – BT node configuration
-
BtServiceNode() = delete
-
inline virtual ~BtServiceNode()
-
inline BT::NodeStatus tick() override
The main override required by a BT service.
- Returns:
BT::NodeStatus Status of tick execution
-
inline void halt() override
The other (optional) override required by a BT service.
-
inline virtual void on_tick()
Function to perform some user-defined operation on tick Fill in service request with information if necessary.
Function to perform some user-defined operation upon successful completion of the service. Could put a value on the blackboard.
- Parameters:
response – can be used to get the result of the service call in the BT Node.
- Returns:
BT::NodeStatus Returns SUCCESS by default, user may override to return another value
-
inline virtual BT::NodeStatus check_future()
Check the future and decide the status of BT.
- Returns:
BT::NodeStatus SUCCESS if future complete before timeout, FAILURE otherwise
-
inline virtual void on_wait_for_result()
Function to perform some user-defined operation after a timeout waiting for a result that hasn’t been received yet.
Public Static Functions
-
static inline BT::PortsList providedBasicPorts(BT::PortsList addition)
Any subclass of BtServiceNode that accepts parameters must provide a providedPorts method and call providedBasicPorts in it.
- Parameters:
addition – Additional ports to add to BT port list
- Returns:
BT::PortsList Containing basic ports along with node-specific ports
Protected Functions
-
inline void increment_recovery_count()
Function to increment recovery count on blackboard if this node wraps a recovery.
Protected Attributes
-
bool request_sent_ = {false}
-
template<typename T>
class BucketPrioQueue - #include <bucketedqueue.h>
Priority queue for integer coordinates with squared distances as priority.
A priority queue that uses buckets to group elements with the same priority. The individual buckets are unsorted, which increases efficiency if these groups are large. The elements are assumed to be integer coordinates, and the priorities are assumed to be squared Euclidean distances (integers).
Public Functions
-
BucketPrioQueue()
Standard constructor.
Standard constructor. When called for the first time it creates a look up table that maps square distances to bucket numbers, which might take some time…
-
inline void clear()
-
bool empty()
Checks whether the Queue is empty.
-
inline int size()
-
inline int getNumBuckets()
-
inline int getTopPriority()
-
BucketPrioQueue()
-
class Camera : public as2::sensors::TFStatic, protected as2::sensors::GenericSensor
- #include <sensor.hpp>
Class to handle the camera sensor.
Public Functions
-
Camera(as2::Node *node_ptr, const std::string &prefix = "", const float pub_freq = -1.0f, bool add_sensor_measurements_base = true, const std::string &camera_link = "camera_link")
Construct a new Camera object.
- Parameters:
node_ptr – Pointer to the node
prefix – ROS 2 parameter prefix. If not using ROS 2 parameters, give the camera name (e.g. “camera_front”)
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
info_name – Name of the camera info topic. Default is “camera_info”
camera_link – Name of the camera link frame id. Default is “camera_link”
-
inline Camera(const std::string &prefix, as2::Node *node_ptr, const float pub_freq = -1.0f, bool add_sensor_measurements_base = true, const std::string &camera_link = "camera_link")
Construct a new Camera object. DEPRECATED.
- Parameters:
prefix – ROS 2 parameter prefix. If not using ROS 2 parameters, give the camera name (e.g. “camera_front”)
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
info_name – Name of the camera info topic. Default is “camera_info”
camera_link – Name of the camera link frame id. Default is “camera_link”
-
inline void setParameters(const sensor_msgs::msg::CameraInfo &camera_info, const std::string &encoding, const std::string &camera_model = "pinhole")
Set Camera parameters. DEPRECATED.
-
void updateData(const sensor_msgs::msg::Image &img)
Update the data of the camera.
- Parameters:
img – Image message
-
void updateData(const cv::Mat &img)
Update the data of the camera.
- Parameters:
img – Image message
-
void setCameraInfo(const sensor_msgs::msg::CameraInfo &camera_info)
Set camera info parameters.
- Parameters:
camera_info – Camera info message
-
void setCameraLinkTransform(const std::string &parent_frame_id, const float x, const float y, const float z, const float roll, const float pitch, const float yaw)
Set camera link frame transformation relative to the parent frame.
- Parameters:
parent_frame_id – Parent frame ID (e.g. base_link)
x – X position (m)
y – Y position (m)
z – Z position (m)
roll – Roll (rad)
pitch – Pitch (rad)
yaw – Yaw (rad)
-
void setEncoding(const std::string &encoding)
Set camera encoding.
- Parameters:
encoding – Encoding of the camera
Private Functions
-
void setup()
Setup the camera info.
-
virtual void publishData()
Publish the data in a topic.
-
Camera(as2::Node *node_ptr, const std::string &prefix = "", const float pub_freq = -1.0f, bool add_sensor_measurements_base = true, const std::string &camera_link = "camera_link")
-
class CellNode
- #include <cell_node.hpp>
CellNode class, a node in a grid.
Public Functions
-
inline CellNode(const Point2i &coordinates, const CellNodePtr &parent_ptr, double g_cost, double h_cost = 0)
Constructor for CellNode class.
- Parameters:
coordinates – coordinates of the cell
parent_ptr – parent node
g_cost – cost to reach this node
h_cost – heuristic cost to reach the goal
-
inline void set_g_cost(double g_cost)
-
inline int x()
-
inline int y()
-
inline CellNodePtr parent_ptr()
-
inline double get_g_cost()
-
inline double get_h_cost()
-
inline double get_total_cost()
-
inline CellNode(const Point2i &coordinates, const CellNodePtr &parent_ptr, double g_cost, double h_cost = 0)
-
struct Control_flags
-
struct Control_flags
Public Members
-
bool state_received = false
-
bool ref_received = false
-
bool plugin_parameters_read = false
-
bool position_controller_parameters_read = false
-
bool velocity_controller_parameters_read = false
-
bool speed_in_a_plane_controller_parameters_read = false
-
bool trajectory_controller_parameters_read = false
-
bool yaw_controller_parameters_read = false
-
bool state_received = false
-
class ControllerBase
Subclassed by differential_flatness_controller::Plugin, pid_speed_controller::Plugin
Public Functions
-
inline ControllerBase()
-
inline virtual void ownInitialize()
-
virtual void updateState(const geometry_msgs::msg::PoseStamped &pose_msg, const geometry_msgs::msg::TwistStamped &twist_msg) = 0
-
inline virtual void updateReference(const geometry_msgs::msg::PoseStamped &ref)
-
inline virtual void updateReference(const geometry_msgs::msg::TwistStamped &ref)
-
inline virtual void updateReference(const as2_msgs::msg::TrajectorySetpoints &ref)
-
inline virtual void updateReference(const as2_msgs::msg::Thrust &ref)
-
virtual bool computeOutput(double dt, geometry_msgs::msg::PoseStamped &pose, geometry_msgs::msg::TwistStamped &twist, as2_msgs::msg::Thrust &thrust) = 0
-
virtual bool setMode(const as2_msgs::msg::ControlMode &mode_in, const as2_msgs::msg::ControlMode &mode_out) = 0
-
virtual void reset() = 0
-
inline virtual ~ControllerBase()
-
inline ControllerBase()
-
class ControllerHandler
Public Functions
-
inline virtual ~ControllerHandler()
-
rcl_interfaces::msg::SetParametersResult parametersCallback(const std::vector<rclcpp::Parameter> ¶meters)
-
void getMode(as2_msgs::msg::ControlMode &mode_in, as2_msgs::msg::ControlMode &mode_out)
-
void reset()
Private Functions
-
bool listPlatformAvailableControlModes()
-
void controlTimerCallback()
-
bool findSuitableOutputControlModeForPlatformInputMode(uint8_t &output_mode, const uint8_t input_mode)
-
bool checkSuitabilityInputMode(uint8_t &input_mode, const uint8_t output_mode)
-
bool setPlatformControlMode(const as2_msgs::msg::ControlMode &mode)
-
bool findSuitableControlModes(uint8_t &input_mode, uint8_t &output_mode)
-
bool trySetPlatformHover()
-
bool tryToBypassController(const uint8_t input_mode, uint8_t &output_mode)
-
void sendCommand()
-
void publishCommand()
Private Members
-
as2::SynchronousServiceClient<as2_msgs::srv::SetControlMode>::SharedPtr set_control_mode_client_
-
as2::SynchronousServiceClient<as2_msgs::srv::ListControlModes>::SharedPtr list_control_modes_client_
-
bool control_mode_established_ = false
-
bool motion_reference_adquired_ = false
-
bool state_adquired_ = false
-
bool use_bypass_ = false
-
bool bypass_controller_ = false
-
uint8_t prefered_output_mode_ = 0b00000000
-
as2_msgs::msg::PlatformInfo platform_info_
-
as2_msgs::msg::ControlMode control_mode_in_
-
as2_msgs::msg::ControlMode control_mode_out_
-
geometry_msgs::msg::PoseStamped state_pose_
-
geometry_msgs::msg::TwistStamped state_twist_
-
geometry_msgs::msg::PoseStamped ref_pose_
-
geometry_msgs::msg::TwistStamped ref_twist_
-
as2_msgs::msg::TrajectorySetpoints ref_traj_
-
as2_msgs::msg::Thrust ref_thrust_
-
geometry_msgs::msg::PoseStamped command_pose_
-
geometry_msgs::msg::TwistStamped command_twist_
-
as2_msgs::msg::Thrust command_thrust_
-
std::shared_ptr<as2_motion_controller_plugin_base::ControllerBase> controller_ptr_
-
inline virtual ~ControllerHandler()
-
class ControllerManager : public as2::Node
Public Functions
-
~ControllerManager()
Public Members
-
double cmd_freq_
Private Functions
-
void modeTimerCallback()
Private Members
-
double info_freq_
-
std::shared_ptr<pluginlib::ClassLoader<as2_motion_controller_plugin_base::ControllerBase>> loader_
-
std::shared_ptr<controller_handler::ControllerHandler> controller_handler_
-
std::shared_ptr<as2_motion_controller_plugin_base::ControllerBase> controller_
-
~ControllerManager()
-
struct dataCell
-
class DetectArucoMarkersBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::DetectArucoMarkers>
Public Functions
-
DetectArucoMarkersBehavior()
Construct a new Aruco Detector object.
-
inline ~DetectArucoMarkersBehavior()
Destroy the Aruco Detector object.
Private Functions
-
void loadParameters()
-
void setup()
-
void setCameraParameters(const sensor_msgs::msg::CameraInfo &_camera_info)
-
bool checkIdIsTarget(const int _id)
As2 Behavior methods
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
DetectArucoMarkersBehavior()
-
class DisarmService : public as2_behavior_tree::BtServiceNode<std_srvs::srv::SetBool>
-
class DroneSwarm
Public Functions
-
inline ~DroneSwarm()
-
std::shared_ptr<rclcpp_action::ClientGoalHandle<as2_msgs::action::FollowReference>> initFollowReference()
Initialize the follow refrence.
- Returns:
std::shared_ptr<rclcpp_action::ClientGoalHandle<as2_msgs::action::FollowReference>> Future of the FollowReference behavior
-
bool stopFollowReference()
Send request to stop following the refernce in the swarm.
- Returns:
bool Response of the service
-
bool checkPosition()
Check if the drones are in their reference position.
- Returns:
bool Return true if the drones are less than 0.3 meters from the reference
-
bool updateStaticTf(geometry_msgs::msg::Pose pose)
Update the static tf of the drones.
- Parameters:
pose – The new reference pose
Public Members
-
geometry_msgs::msg::Pose init_pose_
-
geometry_msgs::msg::PoseStamped drone_pose_
-
geometry_msgs::msg::TransformStamped transform_
Private Functions
Callback to update the current pose of the drone.
- Parameters:
_pose_msg – The curent pose of the drone
Callback to update the feedback of the follow reference action.
- Parameters:
goal_handle – The goal handle of the follow reference action
feedback – The feedback of the follow reference action
Private Members
-
rclcpp_action::Client<as2_msgs::action::FollowReference>::SharedPtr follow_reference_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr follow_reference_stop_client_ = nullptr
-
float max_speed_
-
inline ~DroneSwarm()
-
class DynamicPolynomialTrajectoryGenerator : public as2_behavior::BehaviorServer<as2_msgs::action::GeneratePolynomialTrajectory>
Public Functions
-
inline ~DynamicPolynomialTrajectoryGenerator()
Private Functions
As2 Behavior methods
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
void timerUpdateFrameCallback()
Callback to check the errors between frames and update the frame offset.
Topic Callbacks
For faster waypoint modified
-
void setup()
Trajectory generator functions
-
bool evaluateTrajectory(double eval_time)
-
bool evaluateSetpoint(double eval_time, as2_msgs::msg::TrajectoryPoint &trajectory_command, bool current_setpoint = true)
-
bool updateFrame(const as2_msgs::action::GeneratePolynomialTrajectory::Goal &goal)
update the trajectory waypoint and waypoint_to_set_queue with the frame offset
- Parameters:
goal – the goal of the action
- Returns:
bool Return false if the transform between the map and the desired frame is not available and true otherwise
-
double computeYawAnglePathFacing(double vx, double vy)
-
double computeYawFaceReference()
Compute the Yaw angle to face the next reference point.
- Returns:
double Current yaw angle if the distance to the next reference point is less than the yaw_threshold_ or the angle to face the next reference point otherwise
-
bool computeErrorFrames()
Compute the error frames between the map and the desired frame.
- Returns:
bool Return true if the frame offset is bigger than the transform_threshold_ and false otherwise
-
void plotTrajectory()
Debug functions
-
void plotTrajectoryThread()
-
void plotRefTrajPoint()
Private Members
-
double frequency_update_frame_ = 0.0
-
std::shared_ptr<dynamic_traj_generator::DynamicTrajectory> trajectory_generator_
Dynamic trajectory generator library
-
as2::motionReferenceHandlers::HoverMotion hover_motion_handler_
Handlers
-
as2::motionReferenceHandlers::TrajectoryMotion trajectory_motion_handler_
-
int sampling_n_ = 1
-
double sampling_dt_ = 0.0
-
int path_length_ = 0
-
float yaw_threshold_ = 0
-
float transform_threshold_ = 1.0
-
double yaw_speed_threshold_ = 2.0
-
double wp_close_threshold_ = 0.0
-
as2_msgs::msg::YawMode yaw_mode_
-
as2_msgs::action::GeneratePolynomialTrajectory::Goal goal_
-
as2_msgs::action::GeneratePolynomialTrajectory::Feedback feedback_
-
as2_msgs::action::GeneratePolynomialTrajectory::Result result_
-
bool has_yaw_from_topic_ = false
-
float yaw_from_topic_ = 0.0f
-
float init_yaw_angle_ = 0.0f
-
Eigen::Vector3d current_position_
-
geometry_msgs::msg::TransformStamped current_map_to_odom_transform_
-
geometry_msgs::msg::TransformStamped last_map_to_odom_transform_
-
double current_yaw_
-
as2_msgs::msg::TrajectorySetpoints trajectory_command_
-
bool first_run_ = false
-
bool has_odom_ = false
-
dynamic_traj_generator::DynamicWaypoint::Deque waypoints_to_set_
-
bool enable_debug_ = false
-
inline ~DynamicPolynomialTrajectoryGenerator()
-
class DynamicVoronoi
- #include <dynamicvoronoi.h>
A DynamicVoronoi object computes and updates a distance map and Voronoi diagram.
Public Functions
-
DynamicVoronoi()
-
~DynamicVoronoi()
-
void initializeEmpty(int _sizeX, int _sizeY, bool initGridMap = true)
Initialization with an empty map.
-
void initializeMap(int _sizeX, int _sizeY, bool **_gridMap)
Initialization with a given binary map (false==free, true==occupied)
-
void occupyCell(int x, int y)
add an obstacle at the specified cell coordinate
-
void clearCell(int x, int y)
remove an obstacle at the specified cell coordinate
-
void exchangeObstacles(std::vector<INTPOINT> &newObstacles)
remove old dynamic obstacles and add the new ones
-
void update(bool updateRealDist = true)
update distance map and Voronoi diagram to reflect the changes
-
void prune()
prune the Voronoi diagram
-
void updateAlternativePrunedDiagram()
prune the Voronoi diagram by globally revisiting all Voronoi nodes. Takes more time but gives a more sparsely pruned Voronoi graph. You need to call this after every call to udpate()
-
inline int **alternativePrunedDiagram()
retrieve the alternatively pruned diagram. see updateAlternativePrunedDiagram()
-
int getNumVoronoiNeighborsAlternative(int x, int y)
retrieve the number of neighbors that are Voronoi nodes (4-connected)
-
bool isVoronoiAlternative(int x, int y)
returns whether the specified cell is part of the alternatively pruned diagram. See updateAlternativePrunedDiagram.
-
float getDistance(int x, int y)
returns the obstacle distance at the specified location
-
bool isVoronoi(int x, int y)
returns whether the specified cell is part of the (pruned) Voronoi graph
-
bool isOccupied(int x, int y)
checks whether the specficied location is occupied
-
void visualize(const char *filename = "result.ppm")
write the current distance map and voronoi diagram as ppm file
-
inline unsigned int getSizeX()
returns the horizontal size of the workspace/map
-
inline unsigned int getSizeY()
returns the vertical size of the workspace/map
Private Types
-
enum State
Values:
-
enumerator voronoiKeep
-
enumerator freeQueued
-
enumerator voronoiRetry
-
enumerator voronoiPrune
-
enumerator free
-
enumerator occupied
-
enumerator voronoiKeep
Private Functions
-
void setObstacle(int x, int y)
-
void removeObstacle(int x, int y)
-
void recheckVoro()
-
void commitAndColorize(bool updateRealDist = true)
-
inline void reviveVoroNeighbors(int &x, int &y)
-
inline markerMatchResult markerMatch(int x, int y)
-
inline bool markerMatchAlternative(int x, int y)
-
inline int getVoronoiPruneValence(int x, int y)
-
DynamicVoronoi()
-
struct EigenTwist
- #include <Common.hpp>
Struct containing linear and angular velocities.
-
struct follow_path_plugin_params
-
class FollowPathAction : public as2_behavior_tree::BtActionNode<as2_msgs::action::FollowPath>
Public Functions
-
inline virtual void on_tick()
Function to perform some user-defined operation on tick Could do dynamic checks, such as getting updates to values on the blackboard.
-
inline virtual void on_tick()
-
class FollowPathBase
Subclassed by follow_path_plugin_position::Plugin, follow_path_plugin_trajectory::Plugin
Public Types
-
using GoalHandleFollowPath = rclcpp_action::ServerGoalHandle<as2_msgs::action::FollowPath>
Public Functions
-
inline FollowPathBase()
-
inline virtual ~FollowPathBase()
-
inline virtual void state_callback(geometry_msgs::msg::PoseStamped &pose_msg, geometry_msgs::msg::TwistStamped &twist_msg)
-
inline void on_execution_end(const as2_behavior::ExecutionStatus &state)
Protected Functions
-
inline virtual void ownInit()
-
virtual bool own_activate(as2_msgs::action::FollowPath::Goal &goal) = 0
-
inline virtual bool own_modify(as2_msgs::action::FollowPath::Goal &goal)
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) = 0
-
virtual as2_behavior::ExecutionStatus own_run() = 0
-
virtual Eigen::Vector3d getTargetPosition() = 0
-
inline void sendHover()
-
inline float getActualYaw()
Protected Attributes
-
as2_msgs::action::FollowPath::Goal goal_
-
as2_msgs::action::FollowPath::Feedback feedback_
-
as2_msgs::action::FollowPath::Result result_
-
int platform_state_
-
follow_path_plugin_params params_
-
geometry_msgs::msg::PoseStamped actual_pose_
-
bool localization_flag_ = false
Private Functions
-
inline bool processGoal(as2_msgs::action::FollowPath::Goal &_goal)
-
inline void reset()
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::HoverMotion> hover_motion_handler_ = nullptr
-
bool goal_accepted_ = false
-
using GoalHandleFollowPath = rclcpp_action::ServerGoalHandle<as2_msgs::action::FollowPath>
-
class FollowPathBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::FollowPath>
Public Types
-
using GoalHandleFollowPath = rclcpp_action::ServerGoalHandle<as2_msgs::action::FollowPath>
Public Functions
-
~FollowPathBehavior()
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Private Members
-
std::shared_ptr<pluginlib::ClassLoader<follow_path_base::FollowPathBase>> loader_
-
std::shared_ptr<follow_path_base::FollowPathBase> follow_path_plugin_
-
using GoalHandleFollowPath = rclcpp_action::ServerGoalHandle<as2_msgs::action::FollowPath>
-
class FollowReferenceBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::FollowReference>
Public Types
-
using GoalHandleFollowReference = rclcpp_action::ServerGoalHandle<as2_msgs::action::FollowReference>
Public Functions
-
~FollowReferenceBehavior()
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Private Functions
-
inline void sendHover()
-
inline float getActualYaw()
-
bool getState()
-
bool computeYaw(const uint8_t yaw_mode, const geometry_msgs::msg::Point &target, const geometry_msgs::msg::Point &actual, float &yaw)
-
bool checkGoal(as2_msgs::action::FollowReference::Goal &_goal)
Private Members
-
geometry_msgs::msg::PoseStamped actual_pose_
-
geometry_msgs::msg::TwistStamped actual_twist
-
as2_msgs::action::FollowReference::Goal goal_
-
as2_msgs::action::FollowReference::Feedback feedback_
-
as2_msgs::action::FollowReference::Result result_
-
std::shared_ptr<as2::motionReferenceHandlers::PositionMotion> position_motion_handler_ = nullptr
-
std::shared_ptr<as2::motionReferenceHandlers::HoverMotion> hover_motion_handler_ = nullptr
-
int platform_state_
-
bool localization_flag_ = false
-
using GoalHandleFollowReference = rclcpp_action::ServerGoalHandle<as2_msgs::action::FollowReference>
-
class ForceEstimation
Public Functions
-
ForceEstimation(double alpha, size_t n_samples)
-
inline ~ForceEstimation()
-
double computeThrustError(const double ¤t_mass, const double a_z_mean, const double &u_thrust)
Compute thrust from IMU measurements.
- Parameters:
current_mass – Current mass
a_z_mean – Mean of the last n samples of the z-acceleration
u_thrust – Current thrust command
- Returns:
Thrust error estimation in Newtons
-
double computedMeanFromVector(std::vector<double> &vec)
Compute mean from a vector of doubles.
- Parameters:
vec – Vector of doubles
- Returns:
Mean value
-
double computedMeanFromNSamples(const std::vector<double> &vec)
Compute mean from the last n samples of a vector of doubles.
- Parameters:
vec – Vector of doubles
- Returns:
Mean value
-
double lowPassFiltered(double &error, double &last_filtered_error)
Low-pass filter.
- Parameters:
error – Input thrust value
last_filtered_error – Last filtered error value
- Returns:
Filtered thrust value
-
ForceEstimation(double alpha, size_t n_samples)
-
class ForceEstimationBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::ForceEstimation>
Public Functions
-
inline ~ForceEstimationBehavior()
Private Functions
As2 Behavior methods
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
void filterForceError()
-
void updateForceParameter()
Private Members
-
std::shared_ptr<ForceEstimation> force_estimation_lib
-
double force_error_
-
as2::SynchronousServiceClient<rcl_interfaces::srv::GetParameters>::SharedPtr get_parameters_client_
-
as2::SynchronousServiceClient<rcl_interfaces::srv::SetParameters>::SharedPtr set_parameters_client_
-
rcl_interfaces::msg::Parameter param_
-
double alpha_
-
size_t n_samples_
-
double threshold_time_sync
-
double fz_filtered_error_
-
double fz_update_error
-
double minimum_error_
-
double maximum_error_
-
double mass_
-
double published_force_error_
-
double last_filtered_error_
-
double default_mass
-
double thrust_comanded_msg_
-
bool first_thrust_
-
inline ~ForceEstimationBehavior()
-
struct FrameData
- #include <Common.hpp>
Frame data of a link including its pose and linear velocity in world frame as well as its angular velocity in body frame.
Public Functions
-
inline explicit FrameData(const Eigen::Vector3d &ang_vel_in)
-
inline explicit FrameData(const Eigen::Vector3d &ang_vel_in)
Public Members
-
Eigen::Vector3d angularVelocityBody
-
inline explicit FrameData(const Eigen::Vector3d &ang_vel_in)
-
class GazeboPlatform : public as2::AerialPlatform
Public Functions
-
inline ~GazeboPlatform()
-
inline virtual void configureSensors()
Configures the platform sensors.
-
virtual bool ownSendCommand() override
Handles how a command must be sended in the concrete platform.
- Returns:
true command is sended successfully.
- Returns:
false command is not sended.
-
virtual bool ownSetArmingState(bool state) override
Handles how arming state has to be settled in the concrete platform.
- Parameters:
state – true for arming the platform, false to disarm.
- Returns:
true Arming state is settled successfully.
- Returns:
false Arming state is not settled.
-
virtual bool ownSetOffboardControl(bool offboard) override
Handles how offboard mode has to be settled in the concrete platform.
- Parameters:
offboard – true if offboard mode is enabled.
- Returns:
true Offboard mode is settled successfully.
- Returns:
false Offboard mode is not settled.
-
virtual bool ownSetPlatformControlMode(const as2_msgs::msg::ControlMode &msg) override
Handles how the control mode has to be settled in the concrete platform.
- Parameters:
control_mode – as2_msgs::msg::PlatformControlMode with the new control mode.
- Returns:
true Control mode is settled successfully.
- Returns:
false Control mode is not settled.
-
virtual void ownKillSwitch() override
Handles the platform emergency kill switch command. This means stop the motors inmediately, this cannot be reversed. USE WITH CAUTION.
-
virtual void ownStopPlatform() override
Handles the platform emergency stop command. STOP means to hover as best as possible. This hover is different from the hover in the platform control mode. And when it is activated the platform will stop hearing commands from AS2. USE WITH CAUTION.
-
virtual bool ownTakeoff() override
Handles the platform takeoff command.
- Returns:
true Takeoff command is sended successfully.
- Returns:
false Takeoff command is not sended.
-
virtual bool ownLand() override
Handles the platform landing command.
- Returns:
true Landing command is sended successfully.
- Returns:
false Landing command is not sended.
Public Members
-
inline ~GazeboPlatform()
-
template<class Clock = std::chrono::high_resolution_clock>
class GenericRate : public as2::rate::RateBase
-
class GenericSensor
- #include <sensor.hpp>
GenericSensor object to publish sensor data at a given frequency.
Subclassed by as2::sensors::Camera, as2::sensors::Gimbal, as2::sensors::GroundTruth, as2::sensors::Sensor< T >
Public Functions
-
explicit GenericSensor(as2::Node *node_ptr, const float pub_freq = -1.0f)
Construct a new GenericSensor object.
- Parameters:
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
-
virtual ~GenericSensor()
Destroy the GenericSensor object.
-
void dataUpdated()
User must call this function when the data is updated.
-
virtual void publishData() = 0
User must implement the data publishing in this function.
Private Functions
-
void timerCallback()
Callback function for the timer. Publishes the data.
-
explicit GenericSensor(as2::Node *node_ptr, const float pub_freq = -1.0f)
-
struct geozone
-
class Geozones : public as2::Node
-
Private Types
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
Private Functions
-
void rvizVisualizationCb()
-
void checkGeozones()
-
bool findGeozoneId(int id)
-
void setupGPS()
-
virtual CallbackReturn on_configure(const rclcpp_lifecycle::State&) override
Callback for the configure state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_activate(const rclcpp_lifecycle::State&) override
-
virtual CallbackReturn on_deactivate(const rclcpp_lifecycle::State&) override
Callback for the deactivate state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_shutdown(const rclcpp_lifecycle::State&) override
Callback for the shutdown state.
- Parameters:
state –
- Returns:
CallbackReturn
Private Members
-
bool start_run_
-
bool origin_set_ = false
-
float self_latitude_
-
float self_longitude_
-
float self_altitude_
-
float self_x_
-
float self_y_
-
float self_z_
-
int max_priority
-
bool geofence_detected
-
bool rviz_visualization_ = false
-
geographic_msgs::msg::GeoPoint::UniquePtr origin_
-
std::unique_ptr<as2::gps::GpsHandler> gps_handler
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
-
class GetOrigin : public as2_behavior_tree::BtServiceNode<as2_msgs::srv::GetOrigin>
Public Functions
-
virtual void on_tick() override
Function to perform some user-defined operation on tick Fill in service request with information if necessary.
-
virtual void on_tick() override
-
class Gimbal : public as2::sensors::TFStatic, protected as2::sensors::TFDynamic, protected as2::sensors::GenericSensor, protected as2::sensors::SensorData<geometry_msgs::msg::PoseStamped>
- #include <sensor.hpp>
Class to handle the gimbal sensor.
Public Functions
-
explicit Gimbal(const std::string &gimbal_id, const std::string &gimbal_base_id, as2::Node *node_ptr, const float pub_freq = -1.0f, bool add_sensor_measurements_base = true)
Construct a new Gimbal object.
- Parameters:
gimbal_id – Frame ID of the gimbal
gimbal_base_id – Frame ID of the gimbal base
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
-
void setGimbalBaseTransform(const geometry_msgs::msg::Transform &gimbal_base_transform, const std::string &gimbal_parent_frame_id = "base_link")
Set the gimbal base transformation respect to the parent frame.
- Parameters:
gimbal_base_transform – Transform message
gimbal_parent_frame_id – Parent frame ID (default is “base_link”)
-
void updateData(const geometry_msgs::msg::PoseStamped &pose_msg)
Update the gimbal transformation respect to the base.
- Parameters:
pose_msg – Pose message
-
void updateData(const geometry_msgs::msg::QuaternionStamped &orientation_msg)
Update the gimbal transformation respect to the base.
- Parameters:
pose_msg – Pose message
Protected Functions
-
virtual void publishData()
Publish the data in a topic and in TF.
-
explicit Gimbal(const std::string &gimbal_id, const std::string &gimbal_base_id, as2::Node *node_ptr, const float pub_freq = -1.0f, bool add_sensor_measurements_base = true)
-
class GimbalBridge : public rclcpp::Node
Public Functions
-
GimbalBridge()
Private Functions
Private Members
Private Static Functions
-
GimbalBridge()
-
struct go_to_plugin_params
-
class GoToAction : public as2_behavior_tree::BtActionNode<as2_msgs::action::GoToWaypoint>
Public Functions
-
virtual void on_tick()
Function to perform some user-defined operation on tick Could do dynamic checks, such as getting updates to values on the blackboard.
-
virtual void on_tick()
-
class GoToBase
Subclassed by go_to_plugin_position::Plugin, go_to_plugin_trajectory::Plugin
Public Types
-
using GoalHandleGoTo = rclcpp_action::ServerGoalHandle<as2_msgs::action::GoToWaypoint>
Public Functions
-
inline GoToBase()
-
inline virtual ~GoToBase()
-
inline void state_callback(geometry_msgs::msg::PoseStamped &pose_msg, geometry_msgs::msg::TwistStamped &twist_msg)
-
inline void on_execution_end(const as2_behavior::ExecutionStatus &state)
Protected Functions
-
inline virtual void ownInit()
-
virtual bool own_activate(as2_msgs::action::GoToWaypoint::Goal &goal) = 0
-
inline virtual bool own_modify(as2_msgs::action::GoToWaypoint::Goal &goal)
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) = 0
-
virtual as2_behavior::ExecutionStatus own_run() = 0
-
inline void sendHover()
Protected Attributes
-
as2_msgs::action::GoToWaypoint::Goal goal_
-
as2_msgs::action::GoToWaypoint::Feedback feedback_
-
as2_msgs::action::GoToWaypoint::Result result_
-
int platform_state_
-
go_to_plugin_params params_
-
geometry_msgs::msg::PoseStamped actual_pose_
-
bool localization_flag_
Private Functions
-
inline bool processGoal(as2_msgs::action::GoToWaypoint::Goal &_goal)
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::HoverMotion> hover_motion_handler_ = nullptr
-
using GoalHandleGoTo = rclcpp_action::ServerGoalHandle<as2_msgs::action::GoToWaypoint>
-
class GoToBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::GoToWaypoint>
Public Types
-
using GoalHandleGoTo = rclcpp_action::ServerGoalHandle<as2_msgs::action::GoToWaypoint>
Public Functions
-
~GoToBehavior()
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Private Members
-
std::shared_ptr<pluginlib::ClassLoader<go_to_base::GoToBase>> loader_
-
std::shared_ptr<go_to_base::GoToBase> go_to_plugin_
-
using GoalHandleGoTo = rclcpp_action::ServerGoalHandle<as2_msgs::action::GoToWaypoint>
-
class GoToGpsAction : public as2_behavior_tree::BtActionNode<as2_msgs::action::GoToWaypoint>
Public Functions
-
virtual void on_tick() override
Function to perform some user-defined operation on tick Could do dynamic checks, such as getting updates to values on the blackboard.
-
virtual void on_tick() override
-
struct gps_object
-
class GpsHandler : private GeographicLib::LocalCartesian
Public Functions
-
inline GpsHandler()
Construct a new Gps Handler object based on WGS84 ellipsoid.
-
inline GpsHandler(double lat0, double lon0, double h0 = 0)
Construct a new Gps Handler object based on WGS84 ellipsoid with a given origin.
- Parameters:
lat0 – Latitude at origin (degrees)
lon0 – Longitude at origin (degrees)
h0 – Altitude at origin (meters)
-
void setOrigin(const double &lat0, const double &lon0, const double &h0 = 0)
-
void setOrigin(const geographic_msgs::msg::GeoPoseStamped &gps)
-
void getOrigin(double &rLat, double &rLon, double &rH)
-
void getOrigin(geographic_msgs::msg::GeoPoseStamped &gps)
-
void LatLon2Local(const double &lat, const double &lon, const double &h, double &rX, double &rY, double &rZ)
-
void LatLon2Local(const geographic_msgs::msg::GeoPoseStamped &gps, double &rX, double &rY, double &rZ)
-
void LatLon2Local(const double &lat, const double &lon, const double &h, geometry_msgs::msg::PoseStamped &ps)
-
void LatLon2Local(const geographic_msgs::msg::GeoPoseStamped &gps, geometry_msgs::msg::PoseStamped &ps)
-
void Local2LatLon(const double &x, const double &y, const double &z, double &rLat, double &rLon, double &rH)
-
void Local2LatLon(const double &x, const double &y, const double &z, geographic_msgs::msg::GeoPoseStamped &gps)
-
void Local2LatLon(const geometry_msgs::msg::PoseStamped &ps, double &rLat, double &rLon, double &rH)
-
void Local2LatLon(const geometry_msgs::msg::PoseStamped &ps, geographic_msgs::msg::GeoPoseStamped &gps)
Public Static Functions
-
static void LatLon2Ecef(const double &lat, const double &lon, const double &h, double &rX, double &rY, double &rZ)
-
static void LatLon2Ecef(const geographic_msgs::msg::GeoPoseStamped &gps, double &rX, double &rY, double &rZ)
-
static void LatLon2Ecef(const double &lat, const double &lon, const double &h, geometry_msgs::msg::PoseStamped &ps)
-
static void LatLon2Ecef(const geographic_msgs::msg::GeoPoseStamped &gps, geometry_msgs::msg::PoseStamped &ps)
-
static void Ecef2LatLon(const double &x, const double &y, const double &z, double &rLat, double &rLon, double &rH)
-
static void Ecef2LatLon(const double &x, const double &y, const double &z, geographic_msgs::msg::GeoPoseStamped &gps)
-
static void Ecef2LatLon(const geometry_msgs::msg::PoseStamped &ps, double &rLat, double &rLon, double &rH)
-
static void Ecef2LatLon(const geometry_msgs::msg::PoseStamped &ps, geographic_msgs::msg::GeoPoseStamped &gps)
-
inline GpsHandler()
-
class GpsToCartesian : public as2_behavior_tree::BtServiceNode<as2_msgs::srv::GeopathToPath>
Public Functions
-
virtual void on_tick() override
Function to perform some user-defined operation on tick Fill in service request with information if necessary.
-
virtual void on_tick() override
-
template<typename T>
class GraphSearcher Public Functions
-
inline GraphSearcher()
Protected Functions
Private Members
-
std::unordered_map<int, CellNodePtr> nodes_visited_
-
std::unordered_map<int, CellNodePtr> nodes_to_visit_
-
inline GraphSearcher()
-
class GripperBase
Subclassed by dc_servo::Plugin, two_fingers::Plugin
Public Functions
-
inline GripperBase()
-
inline virtual ~GripperBase()
-
inline void on_execution_end(const as2_behavior::ExecutionStatus &state)
Protected Functions
-
inline virtual void ownInit()
-
virtual bool own_activate(as2_msgs::action::GripperHandler::Goal &goal) = 0
-
virtual bool own_modify(as2_msgs::action::GripperHandler::Goal &goal) = 0
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) = 0
-
virtual as2_behavior::ExecutionStatus own_run() = 0
-
inline GripperBase()
-
class GripperHandlerBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::GripperHandler>
Public Functions
-
inline ~GripperHandlerBehavior()
Private Functions
As2 Behavior methods
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Private Members
-
as2_msgs::action::GripperHandler::Goal goal_
-
as2_msgs::action::GripperHandler::Result result_
-
as2_msgs::action::GripperHandler::Feedback feedback_
-
std::shared_ptr<pluginlib::ClassLoader<gripper_behavior_plugin_base::GripperBase>> loader_
-
std::shared_ptr<gripper_behavior_plugin_base::GripperBase> gripper_handler_plugin_
-
inline ~GripperHandlerBehavior()
-
class GroundTruth : protected as2::sensors::GenericSensor
- #include <sensor.hpp>
Class to handle the ground truth of the platform.
Public Functions
-
explicit GroundTruth(as2::Node *node_ptr, const float pub_freq = -1, const std::string &topic_name_base = "")
Construct a new GroundTruth object.
- Parameters:
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
topic_name_base – Base name of the topics. Default is “”
-
virtual ~GroundTruth()
Destroy the GroundTruth object.
-
void updateData(const geometry_msgs::msg::PoseStamped &pose_msg)
Update the data of the ground truth.
- Parameters:
pose_msg – Pose message
-
void updateData(const geometry_msgs::msg::TwistStamped &twist_msg)
Update the data of the ground truth.
- Parameters:
twist_msg – Twist message
-
void updateData(const geometry_msgs::msg::PoseStamped &pose_msg, const geometry_msgs::msg::TwistStamped &twist_msg)
Update the data of the ground truth.
- Parameters:
pose_msg – Pose message
twist_msg – Twist message
Protected Functions
-
virtual void publishData() override
User must implement the data publishing in this function.
Protected Attributes
-
std::shared_ptr<SensorData<geometry_msgs::msg::PoseStamped>> pose_sensor_
-
std::shared_ptr<SensorData<geometry_msgs::msg::TwistStamped>> twist_sensor_
-
explicit GroundTruth(as2::Node *node_ptr, const float pub_freq = -1, const std::string &topic_name_base = "")
-
class GroundTruthBridge : public rclcpp::Node
Public Functions
-
GroundTruthBridge()
Private Static Functions
Private Static Attributes
-
GroundTruthBridge()
-
class HoverMotion : public as2::motionReferenceHandlers::BasicMotionReferenceHandler
- #include <hover_motion.hpp>
The HoverMotion class is a motion reference handler that allows the robot to hover at the current position.
Public Functions
-
explicit HoverMotion(as2::Node *node_ptr, const std::string &ns = "")
HoverMotion Constructor.
- Parameters:
node – as2::Node pointer.
-
inline ~HoverMotion()
HoverMotion Destructor.
-
bool sendHover()
Send hover motion command.
- Returns:
true if the motion reference was sent successfully.
-
explicit HoverMotion(as2::Node *node_ptr, const std::string &ns = "")
-
template<typename P = double, int num_rotors = 4>
class IndiController : public pid_controller::PID<double>, public pid_controller::PID<double> - #include <IndiController.hpp>
Incremental Nonlinear Dynamic Inversion (INDI) controller.
Convert the desired thrust and angular velocity to motor angular velocity.
- Template Parameters:
P – Precision type of the controller
num_rotors – Number of rotors of the multirotor
Public Functions
-
inline IndiController(const Matrix3 &inertia, const Matrix4 &mixer_matrix_inverse, const PIDParams &pid_params)
Construct a new Indi Controller object.
- Parameters:
inertia – Vehicle inertia matrix (kg m^2)
mixer_matrix_inverse – Mixer matrix inverse [num_rotors x 6]
pid_params – PID parameters
-
inline explicit IndiController(const IndiControllerParams<P> ¶ms = IndiControllerParams<P>())
Construct a new Indi Controller object.
- Parameters:
params – IndiControllerParams parameters
-
inline ~IndiController()
Destroy the Indi Controller object.
-
inline VectorN acro_to_motor_angular_velocity(const Vector3 ¤t_vehicle_angular_velocity, const Scalar thrust, const Vector3 &desired_angular_velocity, const Scalar dt)
Compute the control action.
- Parameters:
current_vehicle_angular_velocity – Vector3 with the current vehicle angular velocity (rad/s) in body frame
thrust – Scalar with the desired thrust (N) in body frame
desired_angular_velocity – Vector3 with the desired angular velocity (rad/s) in body frame
dt – Scalar with the time step (s)
- Returns:
VectorN with the desired motor angular velocity squared (rad^2/s^2)
-
inline void update_inertia(const Matrix3 &inertia)
Update inertial.
- Parameters:
inertia – Matrix3 Inertia matrix (kg m^2)
-
inline void update_mixer_matrix_inverse(const Matrix4 &mixer_matrix_inverse)
Update mixer matrix inverse.
- Parameters:
mixer_matrix_inverse – MatrixN Mixer matrix inverse
-
inline void update_params(const IndiControllerParams<P> ¶ms)
Update controller parameters.
- Parameters:
params – IndiControllerParams
-
inline const Matrix3 &get_inertia() const
Get the inertia.
- Returns:
Matrix3 Inertia matrix (kg m^2)
-
inline const Matrix4 &get_mixer_matrix_inverse() const
Get the mixer matrix inverse.
- Returns:
MatrixN Mixer matrix inverse
-
inline const Vector3 &get_desired_angular_acceleration() const
Get the desired angular acceleration.
- Returns:
constVector3& Desired angular acceleration (rad/s^2)
-
inline const Vector3 &get_desired_thrust() const
Get the desired thrust.
- Returns:
const Vector3& Desired thrust (N)
-
inline const Vector3 &get_desired_torque() const
Get the desired torque.
- Returns:
const Vector3& Desired torque (N m)
-
inline const VectorN &get_motor_angular_velocity() const
Get the motor angular velocity.
- Returns:
const VectorN& Motor angular velocity squared (rad^2/s^2)
-
inline const Vector3 &get_angular_velocity_error() const
Get the angular velocity error.
- Returns:
Vector3& Angular velocity error (rad/s)
-
inline IndiController(const Matrix3 &inertia, const Matrix4 &mixer_matrix_inverse, const PIDParams &pid_params)
Construct a new Indi Controller object.
- Parameters:
inertia – Vehicle inertia matrix (kg m^2)
mixer_matrix_inverse – Mixer matrix inverse [num_rotors x 6]
pid_params – PID parameters
-
inline explicit IndiController(const IndiControllerParams<P> ¶ms = IndiControllerParams<P>())
Construct a new Indi Controller object.
- Parameters:
params – IndiControllerParams parameters
-
inline ~IndiController()
Destroy the Indi Controller object.
-
inline VectorN acro_to_motor_angular_velocity(const Vector3 ¤t_vehicle_angular_velocity, const Scalar thrust, const Vector3 &desired_angular_velocity, const Scalar dt)
Compute the control action.
- Parameters:
current_vehicle_angular_velocity – Vector3 with the current vehicle angular velocity (rad/s) in body frame
thrust – Scalar with the desired thrust (N) in body frame
desired_angular_velocity – Vector3 with the desired angular velocity (rad/s) in body frame
dt – Scalar with the time step (s)
- Returns:
VectorN with the desired motor angular velocity squared (rad^2/s^2)
-
inline void update_inertia(const Matrix3 &inertia)
Update inertial.
- Parameters:
inertia – Matrix3 Inertia matrix (kg m^2)
-
inline void update_mixer_matrix_inverse(const Matrix4 &mixer_matrix_inverse)
Update mixer matrix inverse.
- Parameters:
mixer_matrix_inverse – MatrixN Mixer matrix inverse
-
inline void update_params(const IndiControllerParams<P> ¶ms)
Update controller parameters.
- Parameters:
params – IndiControllerParams
-
inline const Matrix3 &get_inertia() const
Get the inertia.
- Returns:
Matrix3 Inertia matrix (kg m^2)
-
inline const Matrix4 &get_mixer_matrix_inverse() const
Get the mixer matrix inverse.
- Returns:
MatrixN Mixer matrix inverse
-
inline const Vector3 &get_desired_angular_acceleration() const
Get the desired angular acceleration.
- Returns:
constVector3& Desired angular acceleration (rad/s^2)
-
inline const Vector3 &get_desired_thrust() const
Get the desired thrust.
- Returns:
const Vector3& Desired thrust (N)
-
inline const Vector3 &get_desired_torque() const
Get the desired torque.
- Returns:
const Vector3& Desired torque (N m)
-
inline const VectorN &get_motor_angular_velocity() const
Get the motor angular velocity.
- Returns:
const VectorN& Motor angular velocity squared (rad^2/s^2)
-
inline const Vector3 &get_angular_velocity_error() const
Get the angular velocity error.
- Returns:
Vector3& Angular velocity error (rad/s)
Protected Attributes
Private Types
-
using VectorN = Eigen::Matrix<P, num_rotors, 1>
-
using MatrixN = Eigen::Matrix<P, num_rotors, 6>
-
using Matrix6N = Eigen::Matrix<P, 6, num_rotors>
-
using PID = pid_controller::PID<P>
-
using PIDParams = pid_controller::PIDParams<P>
-
using Scalar = P
-
using Vector3 = Eigen::Matrix<P, 3, 1>
-
using Vector4 = Eigen::Matrix<P, 4, 1>
-
using Vector6 = Eigen::Matrix<P, 6, 1>
-
using VectorN = Eigen::Matrix<P, num_rotors, 1>
-
using Matrix3 = Eigen::Matrix<P, 3, 3>
-
using Matrix4 = Eigen::Matrix<P, 4, 4>
-
using Matrix6 = Eigen::Matrix<P, 6, 6>
-
using MatrixN = Eigen::Matrix<P, num_rotors, 6>
-
using Matrix6N = Eigen::Matrix<P, 6, num_rotors>
-
using PID = pid_controller::PID<P>
-
using PIDParams = pid_controller::PIDParams<P>
-
template<typename P = double, int num_rotors = 4>
struct IndiControllerParams - #include <IndiController.hpp>
INDI controller parameters.
- Template Parameters:
P – Precision type of the controller
Public Types
-
using MatrixN = Eigen::Matrix<P, num_rotors, 4>
-
using PIDParams = pid_controller::PIDParams<P>
-
using Matrix3 = Eigen::Matrix<P, 3, 3>
-
using MatrixN = Eigen::Matrix<P, num_rotors, 4>
-
using PIDParams = pid_controller::PIDParams<P>
-
class IsFlyingCondition : public BT::ConditionNode
Public Functions
-
IsFlyingCondition() = delete
Private Functions
-
IsFlyingCondition() = delete
-
class LandAction : public as2_behavior_tree::BtActionNode<as2_msgs::action::Land>
Public Functions
-
virtual void on_tick() override
Function to perform some user-defined operation on tick Could do dynamic checks, such as getting updates to values on the blackboard.
-
virtual void on_tick() override
-
class LandBase
Subclassed by land_plugin_platform::Plugin, land_plugin_speed::Plugin, land_plugin_trajectory::Plugin
Public Types
-
using GoalHandleLand = rclcpp_action::ServerGoalHandle<as2_msgs::action::Land>
Public Functions
-
inline LandBase()
-
inline virtual ~LandBase()
-
inline virtual void state_callback(geometry_msgs::msg::PoseStamped &pose_msg, geometry_msgs::msg::TwistStamped &twist_msg)
-
inline void on_execution_end(const as2_behavior::ExecutionStatus &state)
Protected Functions
-
inline virtual void ownInit()
-
virtual bool own_activate(as2_msgs::action::Land::Goal &goal) = 0
-
inline virtual bool own_modify(as2_msgs::action::Land::Goal &goal)
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) = 0
-
virtual as2_behavior::ExecutionStatus own_run() = 0
-
inline void sendHover()
Protected Attributes
-
as2_msgs::action::Land::Goal goal_
-
as2_msgs::action::Land::Feedback feedback_
-
as2_msgs::action::Land::Result result_
-
land_plugin_params params_
-
geometry_msgs::msg::PoseStamped actual_pose_
-
bool localization_flag_ = false
Private Functions
-
inline bool processGoal(as2_msgs::action::Land::Goal &_goal)
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::HoverMotion> hover_motion_handler_ = nullptr
-
using GoalHandleLand = rclcpp_action::ServerGoalHandle<as2_msgs::action::Land>
-
class LandBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::Land>
Public Types
-
using GoalHandleLand = rclcpp_action::ServerGoalHandle<as2_msgs::action::Land>
-
using PSME = as2_msgs::msg::PlatformStateMachineEvent
Public Functions
-
~LandBehavior()
-
bool sendEventFSME(const int8_t _event)
-
bool sendDisarm()
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Private Members
-
as2::SynchronousServiceClient<as2_msgs::srv::SetPlatformStateMachineEvent>::SharedPtr platform_land_cli_
-
as2::SynchronousServiceClient<std_srvs::srv::SetBool>::SharedPtr platform_disarm_cli_
-
using GoalHandleLand = rclcpp_action::ServerGoalHandle<as2_msgs::action::Land>
-
class MapServer : public as2::Node
Public Functions
-
MapServer()
-
virtual ~MapServer() = default
-
virtual CallbackReturn on_configure(const rclcpp_lifecycle::State&) override
Callback for the configure state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_deactivate(const rclcpp_lifecycle::State&) override
Callback for the deactivate state.
- Parameters:
state –
- Returns:
CallbackReturn
-
virtual CallbackReturn on_shutdown(const rclcpp_lifecycle::State&) override
Callback for the shutdown state.
- Parameters:
state –
- Returns:
CallbackReturn
Private Types
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
Private Members
-
std::shared_ptr<pluginlib::ClassLoader<as2_map_server_plugin_base::MapServerBase>> loader_
-
std::shared_ptr<as2_map_server_plugin_base::MapServerBase> plugin_ptr_
-
MapServer()
-
class MapServerBase
Subclassed by scan2occ_grid::Plugin
-
class MassEstimationBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::MassEstimation>
Public Functions
-
inline ~MassEstimationBehavior()
Private Functions
As2 Behavior methods
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
void updateMassParameter()
Private Members
-
std::shared_ptr<ParamEstimation> param_estimation_lib
-
as2::SynchronousServiceClient<rcl_interfaces::srv::GetParameters>::SharedPtr get_parameters_client_
-
as2::SynchronousServiceClient<rcl_interfaces::srv::SetParameters>::SharedPtr set_parameters_client_
-
rcl_interfaces::msg::Parameter param_
-
double mass_threshold_
-
double thrust_threshold_
-
double alpha_
-
size_t n_samples_ = 3
-
double mass_publish_interval_
-
double minimum_mass_
-
double maximum_mass_
-
double initial_mass_
-
float last_commanded_thrust_ = 0.0
-
float next_commanded_thrust_ = 0.0
-
double estimated_mass_
-
double filtered_mass_
-
double last_filtered_mass_
-
bool thrust_received_ = false
-
bool behvaior_paused_ = false
-
bool mass_publish_ = true
-
inline ~MassEstimationBehavior()
-
class MulticopterINDIControl : public System, public ISystemConfigure, public ISystemPreUpdate, public System, public ISystemConfigure, public ISystemPreUpdate
Public Functions
-
MulticopterINDIControl() = default
-
MulticopterINDIControl() = default
-
void Configure(const Entity &_entity, const std::shared_ptr<const sdf::Element> &_sdf, EntityComponentManager &_ecm, EventManager &_eventMgr) override
Private Types
-
using RotorConfiguration = std::vector<multicopter_control::Rotor>
-
using RotorConfiguration = std::vector<multicopter_control::Rotor>
Private Functions
-
void OnACRO(const msgs::Float_V &_msg)
Callback for ACRO messages The controller waits for the first ACRO message before publishing any rotor velocities.
- Parameters:
_msg – [in] ACRO message
-
void OnEnable(const msgs::Boolean &_msg)
Callback for enable messages.
- Parameters:
_msg – [in] Callback message. If false, the controller sends a zero rotor velocity command once and gets disabled. If the vehicle is in the air, disabling the controller will cause it to fall. If true, the controller becomes enabled and waits for an ACRO message.
-
void PublishRotorVelocities(gz::sim::EntityComponentManager &_ecm, const Eigen::VectorXd &_vels)
Publish provided rotor velocities.
- Parameters:
_ecm – [in] Mutable reference to the EntityComponentManager
_vels – [in] Rotor velocities to be published
-
math::Inertiald VehicleInertial(const EntityComponentManager &_ecm, Entity _entity)
Get the vehicle inertial from child links and nested models.
- Parameters:
_ecm – [in] Immutable reference to the EntityComponentManager
_entity – [in] Model entity to get inertial for
-
Eigen::Matrix<double, 4, 4> compute_mixer_matrix_4D(const RotorConfiguration &motors)
-
void OnACRO(const msgs::Float_V &_msg)
Callback for ACRO messages The controller waits for the first ACRO message before publishing any rotor velocities.
- Parameters:
_msg – [in] ACRO message
-
void OnEnable(const msgs::Boolean &_msg)
Callback for enable messages.
- Parameters:
_msg – [in] Callback message. If false, the controller sends a zero rotor velocity command once and gets disabled. If the vehicle is in the air, disabling the controller will cause it to fall. If true, the controller becomes enabled and waits for an ACRO message.
-
void PublishRotorVelocities(gz::sim::EntityComponentManager &_ecm, const Eigen::VectorXd &_vels)
Publish provided rotor velocities.
- Parameters:
_ecm – [in] Mutable reference to the EntityComponentManager
_vels – [in] Rotor velocities to be published
-
math::Inertiald VehicleInertial(const EntityComponentManager &_ecm, Entity _entity)
Get the vehicle inertial from child links and nested models.
- Parameters:
_ecm – [in] Immutable reference to the EntityComponentManager
_entity – [in] Model entity to get inertial for
-
Eigen::Matrix<double, 4, 4> compute_mixer_matrix_4D(const RotorConfiguration &motors)
Private Members
-
Model model = {kNullEntity}
Model interface.
-
Entity comLinkEntity
Link Entity.
-
transport::Node node
Gazebo communication node.
-
Eigen::VectorXd rotorVelocities = Eigen::VectorXd::Zero(4)
Holds the computed rotor angular velocities.
-
indi_controller::IndiController<double, 4> indiController
INDI controller, particularized for a quadrotor.
-
multicopter_control::NoiseParameters noiseParameters
Noise parameters read from SDF.
-
std::optional<msgs::Float_V> acroVelMsg
Current ACRO command. This is the reference the controller will try to maintain.
-
math::Vector3d maximumAngularVelocity
Maximum commanded angular velocity.
-
msgs::Actuators rotorVelocitiesMsg
Rotor velocities message.
-
bool initialized = {false}
Becomes true when the system is done initializing.
-
MulticopterINDIControl() = default
-
class MultirotorSimulatorPlatform : public as2::AerialPlatform
Public Functions
-
~MultirotorSimulatorPlatform()
-
virtual void configureSensors() override
Configures the platform sensors.
-
virtual bool ownSetArmingState(bool state) override
Handles how arming state has to be settled in the concrete platform.
- Parameters:
state – true for arming the platform, false to disarm.
- Returns:
true Arming state is settled successfully.
- Returns:
false Arming state is not settled.
-
virtual bool ownSetOffboardControl(bool offboard) override
Handles how offboard mode has to be settled in the concrete platform.
- Parameters:
offboard – true if offboard mode is enabled.
- Returns:
true Offboard mode is settled successfully.
- Returns:
false Offboard mode is not settled.
-
virtual bool ownSetPlatformControlMode(const as2_msgs::msg::ControlMode &msg) override
Handles how the control mode has to be settled in the concrete platform.
- Parameters:
control_mode – as2_msgs::msg::PlatformControlMode with the new control mode.
- Returns:
true Control mode is settled successfully.
- Returns:
false Control mode is not settled.
-
virtual bool ownSendCommand() override
Handles how a command must be sended in the concrete platform.
- Returns:
true command is sended successfully.
- Returns:
false command is not sended.
-
virtual void ownStopPlatform() override
Handles the platform emergency stop command. STOP means to hover as best as possible. This hover is different from the hover in the platform control mode. And when it is activated the platform will stop hearing commands from AS2. USE WITH CAUTION.
-
virtual void ownKillSwitch() override
Handles the platform emergency kill switch command. This means stop the motors inmediately, this cannot be reversed. USE WITH CAUTION.
-
virtual bool ownTakeoff() override
Handles the platform takeoff command.
- Returns:
true Takeoff command is sended successfully.
- Returns:
false Takeoff command is not sended.
-
virtual bool ownLand() override
Handles the platform landing command.
- Returns:
true Landing command is sended successfully.
- Returns:
false Landing command is not sended.
Private Types
-
using Simulator = multirotor::Simulator<double, 4>
-
using SimulatorParams = multirotor::SimulatorParams<double, 4>
-
using Kinematics = multirotor::state::internal::Kinematics<double>
Private Functions
-
Eigen::Vector3d readVectorParams(const std::string ¶m_name)
Read given parameter of vector type.
- Parameters:
param_name – Name of the parameter
- Returns:
Eigen::Vector3d Vector parameter
-
inline void readParams(PlatformParams &platform_params)
Read platform parameters.
- Parameters:
param_name – platform parameters
-
template<typename T>
inline void getParam(const std::string ¶m_name, T ¶m_value, bool use_default = false) Get parameter from the parameter server.
- Parameters:
param_name – Name of the parameter
param_value – Value of the parameter
use_default – Use default value if parameter is not found
-
void simulatorTimerCallback()
Simulator timer callback.
-
void simulatorControlTimerCallback()
Simulator control timer callback.
-
void simulatorInertialOdometryTimerCallback()
Simulator inertial odometry timer callback.
-
void simulatorStateTimerCallback()
Simulator state timer callback.
Private Members
-
As2MultirotorSimulatorInterface as2_interface_
-
as2::gps::GpsHandler gps_handler_
-
PlatformParams platform_params_
-
SimulatorParams simulator_params_
-
geometry_msgs::msg::Point initial_position_
-
Kinematics control_state_
-
bool using_odom_for_control_ = false
-
geometry_msgs::msg::QuaternionStamped gimbal_desired_orientation_
-
std::unique_ptr<as2::sensors::GroundTruth> sensor_ground_truth_ptr_
-
~MultirotorSimulatorPlatform()
-
class Node : public AS2_NODE_FATHER_TYPE
- #include <node.hpp>
Basic Aerostack2 Node, it heritages all the functionality of an rclcpp::Node.
Subclassed by as2_behavior::BehaviorServer< as2_msgs::action::MassEstimation >, as2_behavior::BehaviorServer< as2_msgs::action::SwarmFlocking >, as2_behavior::BehaviorServer< as2_msgs::action::SetArmingState >, as2_behavior::BehaviorServer< as2_msgs::action::NavigateToPoint >, as2_behavior::BehaviorServer< as2_msgs::action::ForceEstimation >, as2_behavior::BehaviorServer< as2_msgs::action::Takeoff >, as2_behavior::BehaviorServer< as2_msgs::action::FollowReference >, as2_behavior::BehaviorServer< as2_msgs::action::GeneratePolynomialTrajectory >, as2_behavior::BehaviorServer< as2_msgs::action::FollowPath >, as2_behavior::BehaviorServer< as2_msgs::action::SetOffboardMode >, as2_behavior::BehaviorServer< as2_msgs::action::GoToWaypoint >, as2_behavior::BehaviorServer< as2_msgs::action::PointGimbal >, as2_behavior::BehaviorServer< as2_msgs::action::DetectArucoMarkers >, as2_behavior::BehaviorServer< as2_msgs::action::GripperHandler >, as2_behavior::BehaviorServer< as2_msgs::action::Land >, AlphanumericViewer, As2ExternalObjectToTf, Geozones, as2::AerialPlatform, as2::BasicBehavior< MessageT >, as2::BasicBehavior< MessageT >, as2_behavior::BehaviorServer< actionT >, as2_map_server::MapServer, as2_state_estimator::StateEstimator, controller_manager::ControllerManager, real_sense_interface::RealsenseInterface, usb_camera_interface::UsbCameraInterface
Public Functions
-
inline Node(const std::string &name, const std::string &ns, const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
Construct a new Node object.
- Parameters:
name – Node name
-
inline explicit Node(const std::string &name, const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
-
inline void configure()
-
inline void activate()
-
inline void deactivate()
-
inline void cleanup()
-
inline void shutdown()
-
inline void error()
-
std::string generate_local_name(const std::string &name)
transform an string into local topic name inside drone namespace and node namespace
- Parameters:
name – source string
- Returns:
std::string result name
-
std::string generate_global_name(const std::string &name)
transform an string into global topic name inside drone namespace
- Parameters:
name – source string
- Returns:
std::string result name
create a timer with the node clock
- Returns:
rclcpp::TimerBase::SharedPtr rclcpp timer using node clock
-
inline bool sleep()
sleeps the node to ensure node_frecuency desired
- Returns:
true the node is sleeping
- Returns:
false the node is not sleeping, this means that desired frequency is not reached
-
inline double get_loop_frequency()
Get the loop frequency object.
- Returns:
double frequency in Hz
-
inline bool preset_loop_frequency(double frequency)
Protected Types
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
Callback for the activate state.
- Param state:
- Return:
CallbackReturn
Protected Functions
-
inline virtual CallbackReturn on_activate(const rclcpp_lifecycle::State& = rclcpp_lifecycle::State())
-
inline virtual CallbackReturn on_deactivate(const rclcpp_lifecycle::State& = rclcpp_lifecycle::State())
Callback for the deactivate state.
- Parameters:
state –
- Returns:
CallbackReturn
-
inline virtual CallbackReturn on_configure(const rclcpp_lifecycle::State& = rclcpp_lifecycle::State())
Callback for the configure state.
- Parameters:
state –
- Returns:
CallbackReturn
-
inline virtual CallbackReturn on_cleanup(const rclcpp_lifecycle::State& = rclcpp_lifecycle::State())
Callback for the cleanup state.
- Parameters:
state –
- Returns:
CallbackReturn
-
inline virtual CallbackReturn on_shutdown(const rclcpp_lifecycle::State& = rclcpp_lifecycle::State())
Callback for the shutdown state.
- Parameters:
state –
- Returns:
CallbackReturn
-
inline virtual CallbackReturn on_error(const rclcpp_lifecycle::State& = rclcpp_lifecycle::State())
Callback for the error state.
- Parameters:
state –
- Returns:
CallbackReturn
Private Functions
-
inline void init()
-
inline Node(const std::string &name, const std::string &ns, const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
-
class Node
-
struct NoiseParameters
- #include <Parameters.hpp>
Noise parameters used when computing frame data. These are all assumed to be gaussian.
-
class ObjectFramePublisher : public rclcpp::Node
Public Functions
-
ObjectFramePublisher()
Private Members
Private Static Functions
Private Static Attributes
-
static bool use_sim_time_ = false
-
ObjectFramePublisher()
-
class OffboardService : public as2_behavior_tree::BtServiceNode<std_srvs::srv::SetBool>
-
class ParamEstimation
Public Functions
-
ParamEstimation(double initial_mass, double threshold, double alpha, size_t n_samples)
-
inline ~ParamEstimation()
-
void computeMass(float &thrust, std::vector<double> &a_z)
Computes the mass based on the thrust and acceleration.
- Parameters:
thrust – Thrust value (z axis)
a_z – Acceleration in z axis
-
void set_threshold(double threshold)
-
void set_alpha(double alpha)
-
void set_n_samples(size_t n_samples)
-
double getEstimatedMass()
-
double getThreshold()
-
double getAlpha()
-
size_t getNSamples()
Private Functions
-
bool computeMassError(double &estimated_mass, double &last_estimated_mass)
Computes the mass error based on the real and estimated mass.
- Parameters:
real_mass – Real mass of the drone
estimated_mass – Estimated mass of the drone
-
double computedMeanFromVector(std::vector<double> &vec)
Computes the mean of a vector.
- Parameters:
vec – Vector to compute the mean
- Returns:
Mean value of the vector
-
double lowPassFiltered(double &mass)
Compute a low pass filter for the mass data.
- Parameters:
mass – Mass value to filter
- Returns:
Filtered mass value
-
ParamEstimation(double initial_mass, double threshold, double alpha, size_t n_samples)
-
class PathPlannerBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::NavigateToPoint>
Public Functions
-
inline ~PathPlannerBehavior()
Private Functions
As2 Behavior methods
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
void follow_path_result_cbk(const rclcpp_action::ClientGoalHandle<as2_msgs::action::FollowPath>::WrappedResult &result)
Private Members
-
as2_msgs::msg::YawMode yaw_mode_
-
as2_msgs::action::NavigateToPoint::Goal goal_
-
as2_msgs::action::NavigateToPoint::Feedback feedback_
-
as2_msgs::action::NavigateToPoint::Result result_
-
bool enable_visualization_ = false
-
bool enable_path_optimizer_ = false
-
geometry_msgs::msg::PoseStamped drone_pose_
-
double safety_distance_ = 1.0
-
bool follow_path_rejected_ = false
-
bool follow_path_succeeded_ = false
-
std::shared_ptr<pluginlib::ClassLoader<as2_behaviors_path_planning::PluginBase>> loader_
-
std::shared_ptr<as2_behaviors_path_planning::PluginBase> path_planner_plugin_
-
rclcpp_action::Client<as2_msgs::action::FollowPath>::SharedPtr follow_path_client_
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr follow_path_pause_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr follow_path_resume_client_ = nullptr
-
inline ~PathPlannerBehavior()
-
template<typename P = double, int dim = 3>
class PID - #include <PIDController.hpp>
PID controller.
- Template Parameters:
P – Precision
dim – Dimension
Public Functions
-
inline explicit PID(const PIDParams<P, dim> &pid_params = PIDParams<P, dim>(), const bool &verbose = false)
Construct a new PID.
- Parameters:
verbose – Verbosity flag. Default: false
-
inline ~PID()
-
inline void update_pid_params(const PIDParams<P, dim> ¶ms)
Update the PID controller with pid params.
- Parameters:
params – PIDParams struct
-
inline void reset_controller()
Reset the controller.
Reset the integral error
-
inline void set_output_saturation(const Vector &upper_saturation, const Vector &lower_saturation, bool proportional_saturation_flag = false)
Set the output saturation.
- Parameters:
upper_saturation – Upper saturation
lower_saturation – Lower saturation
proportional_saturation_flag – Proportional saturation flag. Default: false
-
inline void disable_output_saturation()
Disable the output saturation.
Disable the output saturation. The output is not limited by the saturation limits. To enable the output saturation, use the set_output_saturation method.
- Parameters:
saturation_flag – Saturation flag
-
inline Vector compute_control(const Scalar dt, const Vector &proportional_error)
Process the PID controller.
- Parameters:
dt – Time step
proportional_error – Proportional error
- Returns:
Vector PID output
-
inline Vector compute_control(const Scalar dt, const Vector &proportional_error, const Vector &derivative_error)
Process the PID controller with derivative feedback.
Derivative feedback is used to improve the controller performance.
- Parameters:
dt – Time step (s)
state – Current state
reference – Reference state
state_dot – Current state derivative
reference_dot – Reference state derivative
- Returns:
Vector
-
inline PIDParams<P, dim> get_params() const
Get the params.
- Returns:
PIDParams<P, dim> PID parameters
-
inline void set_gains(const Vector &kp, const Vector &ki, const Vector &kd)
Set the Gains of the controller.
- Parameters:
kp – Proportional gain
ki – Integral gain
kd – Derivative gain
-
inline void get_gains(Vector &kp, Vector &ki, Vector &kd) const
Get the gains.
- Parameters:
kp – Proportional gain
ki – Integral gain
kd – Derivative gain
-
inline void set_anti_windup(const Vector &anti_windup)
Set the anti windup.
Anti windup is a vector that limits the integral contribution of the controller. If the integral contribution is greater/lower than the anti windup, the integral contribution is set to anti windup value.
- Parameters:
anti_windup – Anti windup
-
inline Vector get_anti_windup() const
Get the anti windup.
Anti windup is a value that limits the integral contribution of the controller. If the integral contribution is greater/lower than the anti windup, the integral contribution is set to anti windup value.
- Parameters:
anti_windup – Anti windup
-
inline void set_alpha(const Vector alpha)
Set the alpha.
Alpha is a value that filters the derivative contribution of the controller. If alpha is 1, the derivative contribution is not filtered.
- Parameters:
alpha – Alpha in (0, 1]
-
inline Vector get_alpha() const
Get the alpha.
Alpha is a value that filters the derivative contribution of the controller. If alpha is 1, the derivative contribution is not filtered.
- Parameters:
alpha – Alpha in (0, 1]
-
inline void set_reset_integral_saturation_flag(bool reset_integral_flag)
Set the reset integral saturation flag.
If the flag is true, the integral contribution is reset to zero when the integral error is grater than the anti windup and the sign of the integral error is different from the sign of the proportional error.
- Parameters:
reset_integral_flag – Reset integral saturation flag
-
inline bool get_reset_integral_saturation_flag() const
Get the reset integral saturation flag.
If the flag is true, the integral contribution is reset to zero when the integral error is grater than the anti windup and the sign of the integral error is different from the sign of the proportional error.
- Parameters:
reset_integral_flag – Reset integral saturation flag
-
inline void set_proportional_saturation_flag(bool proportional_saturation_flag)
Set the proportional saturation flag.
If the flag is true, the output is saturated proportionally to the saturation limits. So, the output vector keeps the same direction but its norm is limited to the saturation
- Parameters:
proportional_saturation_flag – Proportional saturation flag
-
inline bool get_proportional_saturation_flag() const
Get the proportional saturation flag.
If the flag is true, the output is saturated proportionally to the saturation limits. So, the output vector keeps the same direction but its norm is limited to the saturation
- Parameters:
proportional_saturation_flag – Proportional saturation flag
-
inline void get_saturation_limits(Vector &saturation_upper_limit, Vector &saturation_lower_limit) const
Get the saturation limits.
- Parameters:
saturation_limits – Saturation limits
-
inline bool get_output_saturation_flag() const
Get the output saturation flag.
- Returns:
true Saturation is enabled
- Returns:
false Saturation is disabled
-
inline const Vector &get_proportional_error() const
Get the proportional error.
- Returns:
Vector Proportional error
-
inline const Vector &get_derivative_error() const
Get the derivative error.
- Returns:
Vector Derivative error
-
inline const Vector &get_proportional_error_contribution() const
Get the proportional error contribution.
- Returns:
Vector Proportional error contribution
-
inline const Vector &get_integral_error_contribution() const
Get the integral error contribution.
- Returns:
Vector Integral error contribution
-
inline const Vector &get_derivative_error_contribution() const
Get the derivative error contribution.
- Returns:
Vector Derivative error contribution
-
inline explicit PID(const PIDParams<P, dim> &pid_params = PIDParams<P, dim>(), const bool &verbose = false)
Construct a new PID.
- Parameters:
verbose – Verbosity flag. Default: false
-
inline ~PID()
-
inline void update_pid_params(const PIDParams<P, dim> ¶ms)
Update the PID controller with pid params.
- Parameters:
params – PIDParams struct
-
inline void reset_controller()
Reset the controller.
Reset the integral error
-
inline void set_output_saturation(const Vector &upper_saturation, const Vector &lower_saturation, bool proportional_saturation_flag = false)
Set the output saturation.
- Parameters:
upper_saturation – Upper saturation
lower_saturation – Lower saturation
proportional_saturation_flag – Proportional saturation flag. Default: false
-
inline void disable_output_saturation()
Disable the output saturation.
Disable the output saturation. The output is not limited by the saturation limits. To enable the output saturation, use the set_output_saturation method.
- Parameters:
saturation_flag – Saturation flag
-
inline Vector compute_control(const Scalar dt, const Vector &proportional_error)
Process the PID controller.
- Parameters:
dt – Time step
proportional_error – Proportional error
- Returns:
Vector PID output
-
inline Vector compute_control(const Scalar dt, const Vector &proportional_error, const Vector &derivative_error)
Process the PID controller with derivative feedback.
Derivative feedback is used to improve the controller performance.
- Parameters:
dt – Time step (s)
state – Current state
reference – Reference state
state_dot – Current state derivative
reference_dot – Reference state derivative
- Returns:
Vector
-
inline PIDParams<P, dim> get_params() const
Get the params.
- Returns:
PIDParams<P, dim> PID parameters
-
inline void set_gains(const Vector &kp, const Vector &ki, const Vector &kd)
Set the Gains of the controller.
- Parameters:
kp – Proportional gain
ki – Integral gain
kd – Derivative gain
-
inline void get_gains(Vector &kp, Vector &ki, Vector &kd) const
Get the gains.
- Parameters:
kp – Proportional gain
ki – Integral gain
kd – Derivative gain
-
inline void set_gains_kp(const Vector &kp)
Set the gains kp.
- Parameters:
kp – Proportional gain
-
inline Vector get_gains_kp() const
Get the gains kp.
- Parameters:
kp – Proportional gain
-
inline void set_gains_ki(const Vector &ki)
Set the gains ki.
- Parameters:
ki – Integral gain
-
inline Vector get_gains_ki() const
Get the gains ki.
- Parameters:
ki – Integral gain
-
inline void set_gains_kd(const Vector &kd)
Set the gains kd.
- Parameters:
kd – Derivative gain
-
inline Vector get_gains_kd() const
Get the gains kd.
- Parameters:
kd – Derivative gain
-
inline void set_anti_windup(const Vector &anti_windup)
Set the anti windup.
Anti windup is a vector that limits the integral contribution of the controller. If the integral contribution is greater/lower than the anti windup, the integral contribution is set to anti windup value.
- Parameters:
anti_windup – Anti windup
-
inline Vector get_anti_windup() const
Get the anti windup.
Anti windup is a value that limits the integral contribution of the controller. If the integral contribution is greater/lower than the anti windup, the integral contribution is set to anti windup value.
- Parameters:
anti_windup – Anti windup
-
inline void set_alpha(const Vector alpha)
Set the alpha.
Alpha is a value that filters the derivative contribution of the controller. If alpha is 1, the derivative contribution is not filtered.
- Parameters:
alpha – Alpha in (0, 1]
-
inline Vector get_alpha() const
Get the alpha.
Alpha is a value that filters the derivative contribution of the controller. If alpha is 1, the derivative contribution is not filtered.
- Parameters:
alpha – Alpha in (0, 1]
-
inline void set_reset_integral_saturation_flag(bool reset_integral_flag)
Set the reset integral saturation flag.
If the flag is true, the integral contribution is reset to zero when the integral error is grater than the anti windup and the sign of the integral error is different from the sign of the proportional error.
- Parameters:
reset_integral_flag – Reset integral saturation flag
-
inline bool get_reset_integral_saturation_flag() const
Get the reset integral saturation flag.
If the flag is true, the integral contribution is reset to zero when the integral error is grater than the anti windup and the sign of the integral error is different from the sign of the proportional error.
- Parameters:
reset_integral_flag – Reset integral saturation flag
-
inline void set_proportional_saturation_flag(bool proportional_saturation_flag)
Set the proportional saturation flag.
If the flag is true, the output is saturated proportionally to the saturation limits. So, the output vector keeps the same direction but its norm is limited to the saturation
- Parameters:
proportional_saturation_flag – Proportional saturation flag
-
inline bool get_proportional_saturation_flag() const
Get the proportional saturation flag.
If the flag is true, the output is saturated proportionally to the saturation limits. So, the output vector keeps the same direction but its norm is limited to the saturation
- Parameters:
proportional_saturation_flag – Proportional saturation flag
-
inline void get_saturation_limits(Vector &saturation_upper_limit, Vector &saturation_lower_limit) const
Get the saturation limits.
- Parameters:
saturation_limits – Saturation limits
-
inline bool get_output_saturation_flag() const
Get the output saturation flag.
- Returns:
true Saturation is enabled
- Returns:
false Saturation is disabled
-
inline const Vector &get_proportional_error() const
Get the proportional error.
- Returns:
Vector Proportional error
-
inline const Vector &get_derivative_error() const
Get the derivative error.
- Returns:
Vector Derivative error
-
inline const Vector &get_proportional_error_contribution() const
Get the proportional error contribution.
- Returns:
Vector Proportional error contribution
-
inline const Vector &get_integral_error_contribution() const
Get the integral error contribution.
- Returns:
Vector Integral error contribution
-
inline const Vector &get_derivative_error_contribution() const
Get the derivative error contribution.
- Returns:
Vector Derivative error contribution
-
inline const Vector &get_output() const
Get the output.
- Returns:
Vector Output
Public Static Functions
-
static inline Vector get_error(const Vector &state, const Vector &reference)
Get the proportional error.
- Parameters:
state – Current state
reference – Reference state
- Returns:
Vector Error
-
static inline void get_error(const Vector &state, const Vector &reference, const Vector &state_dot, const Vector &reference_dot, Vector &proportional_error, Vector &derivative_error)
Get the proportional and derivative error.
- Parameters:
state – State
reference – Reference
state_dot – State derivative
reference_dot – Reference derivative
proportional_error – Output proportional error
derivative_error – Output derivative error
-
static inline Vector saturate_output(const Vector &output, const Vector &upper_limits, const Vector &lower_limits, const bool proportional_saturation = false)
Saturation function.
If the output is greater than the upper limit, the output is saturated to the upper limit. If the output is lower than the lower limit, the output is saturated to the lower limit. If proportional_saturation is true, the output is saturated proportionally to the limits, keeping the vector direction.
- Parameters:
output – Vector to saturate
upper_limits – Upper limits vector
lower_limits – Lower limits vector
proportional_saturation – Proportional saturation flag. Default: false
- Returns:
Vector Saturated vector
-
static inline Vector get_error(const Vector &state, const Vector &reference)
Get the proportional error.
- Parameters:
state – Current state
reference – Reference state
- Returns:
Vector Error
-
static inline void get_error(const Vector &state, const Vector &reference, const Vector &state_dot, const Vector &reference_dot, Vector &proportional_error, Vector &derivative_error)
Get the proportional and derivative error.
- Parameters:
state – State
reference – Reference
state_dot – State derivative
reference_dot – Reference derivative
proportional_error – Output proportional error
derivative_error – Output derivative error
-
static inline Vector saturate_output(const Vector &output, const Vector &upper_limits, const Vector &lower_limits, const bool proportional_saturation = false)
Saturation function.
If the output is greater than the upper limit, the output is saturated to the upper limit. If the output is lower than the lower limit, the output is saturated to the lower limit. If proportional_saturation is true, the output is saturated proportionally to the limits, keeping the vector direction.
- Parameters:
output – Vector to saturate
upper_limits – Upper limits vector
lower_limits – Lower limits vector
proportional_saturation – Proportional saturation flag. Default: false
- Returns:
Vector Saturated vector
Protected Functions
-
inline Vector compute_integral_contribution(const Scalar dt, const Vector &proportional_error)
Compute the integral contribution of the controller.
- Parameters:
dt – Delta time (s)
proportional_error – Proportional error
- Returns:
Vector Integral contribution
-
inline Vector compute_derivative_contribution_by_deriving(const Scalar dt, const Vector &proportional_error)
Compute the derivative contribution of the controller.
- Parameters:
dt – Delta time (s)
proportional_error – Proportional error
- Returns:
Vector Derivative contribution
-
inline Vector compute_derivative_contribution(const Vector &derivate_error)
Compute the derivative contribution of the controller.
For controllers with derivative feedback, the derivative contribution is computed using the state and reference derivatives.
- Parameters:
state_dot – State derivative
reference_dot – Reference derivative
- Returns:
Vector Derivative contribution
-
inline Vector compute_integral_contribution(const Scalar dt, const Vector &proportional_error)
Compute the integral contribution of the controller.
- Parameters:
dt – Delta time (s)
proportional_error – Proportional error
- Returns:
Vector Integral contribution
-
inline Vector compute_derivative_contribution_by_deriving(const Scalar dt, const Vector &proportional_error)
Compute the derivative contribution of the controller.
- Parameters:
dt – Delta time (s)
proportional_error – Proportional error
- Returns:
Vector Derivative contribution
-
inline Vector compute_derivative_contribution(const Vector &derivate_error)
Compute the derivative contribution of the controller.
For controllers with derivative feedback, the derivative contribution is computed using the state and reference derivatives.
- Parameters:
state_dot – State derivative
reference_dot – Reference derivative
- Returns:
Vector Derivative contribution
-
template<typename P = double, int dim = 3>
struct PIDParams Public Types
-
struct PlatformParams
Public Members
-
double update_freq = 1000.0
-
double control_freq = 100.0
-
double inertial_odometry_freq = 1000.0
-
double state_freq = 100.0
-
double imu_pub_freq = 100.0
-
double odometry_pub_freq = 100.0
-
double ground_truth_pub_freq = 100.0
-
double gps_pub_freq = 100.0
-
double gimbal_pub_freq = 100.0
-
double latitude
-
double longitude
-
double altitude
-
double update_freq = 1000.0
-
class PlatformStateMachine
- #include <platform_state_machine.hpp>
This class implements the Platform State Machine, which is in charge of handling the state of the platform using a FSM (Finite State Machine). This state machine consist on 6 states:
DISARMED -> The platform is not armed.
LANDED -> The platform is armed and landed.
TAKING_OFF -> The platform is taking off.
FLYING -> The platform is on air.
LANDING -> The platform is landing.
EMERGENCY -> The platform is in emergency mode.
The events that can trigger the state machine are:
ARM
DISARM
TAKE_OFF
TOOK_OFF
LAND
LANDED
EMERGENCY TODO(miferco97): add figure of the state machine
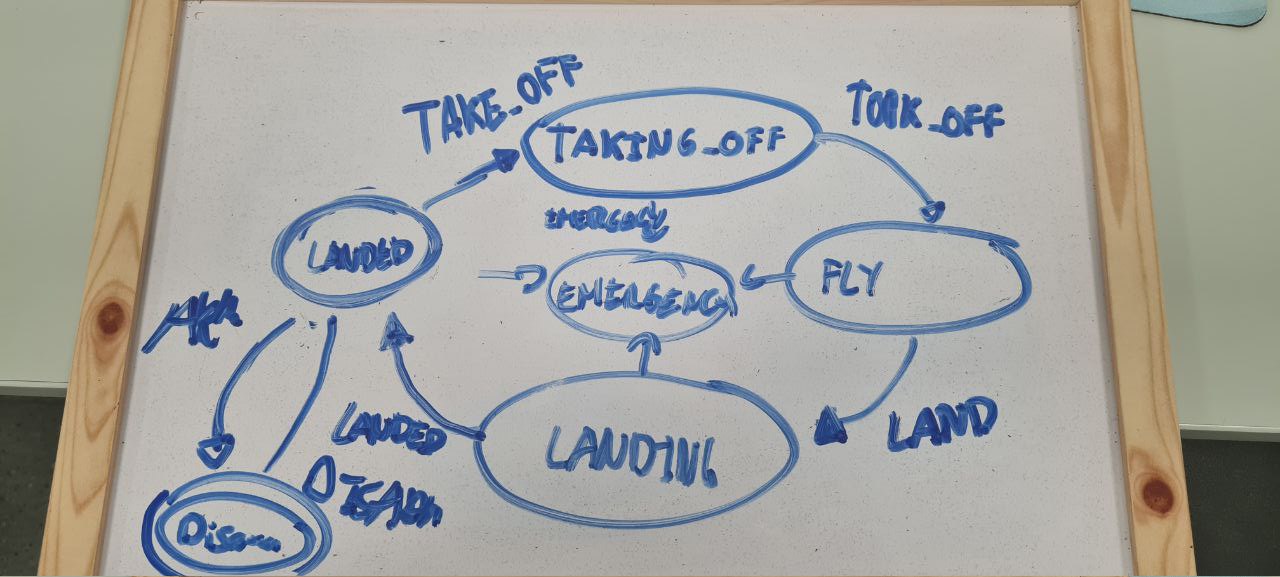
Public Functions
-
explicit PlatformStateMachine(as2::Node *node)
Constructor of the Platform State Machine.
- Parameters:
node_ptr – Pointer to an aerostack2 node.
-
~PlatformStateMachine()
-
bool processEvent(const int8_t &event)
This function is in charge of handling the state machine.
- Parameters:
event – The event that triggers the state machine.
- Returns:
true If the event is valid in current State.
-
bool processEvent(const Event &event)
This function is in charge of handling the state machine.
- Parameters:
event – The event that triggers the state machine.
- Returns:
true If the event is valid in current State.
-
StateMachineTransition getTransition(const int8_t ¤t_state, const int8_t &event)
Get the Transition object.
- Parameters:
current_state –
event –
- Returns:
-
inline as2_msgs::msg::PlatformStatus getState()
This function returns the current state of the state machine.
- Returns:
The current Platform Status of the state machine
-
inline void setState(as2_msgs::msg::PlatformStatus state)
Set the State of the FSM to the desired state. (THIS MAY BE USED ONLY FOR TESTING PURPOSES)
- Parameters:
state –
-
inline void setState(const int8_t &state)
Private Functions
-
void defineTransitions()
in this function the state machine is created based on the transitions. its called in the constructor of the class.
-
class Plugin : public as2_behaviors_path_planning::PluginBase
Public Functions
-
virtual bool on_deactivate() override
-
virtual bool on_modify() override
-
virtual bool on_pause() override
-
virtual bool on_resume() override
-
virtual void on_execution_end() override
-
virtual as2_behavior::ExecutionStatus on_run() override
Private Functions
-
virtual bool on_deactivate() override
-
class Plugin : public gripper_behavior_plugin_base::GripperBase
Public Functions
-
virtual void ownInit() override
-
virtual bool own_activate(as2_msgs::action::GripperHandler::Goal &_goal) override
-
virtual bool own_modify(as2_msgs::action::GripperHandler::Goal &_goal) override
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
virtual as2_behavior::ExecutionStatus own_run() override
-
virtual void ownInit() override
-
class Plugin : public as2_motion_controller_plugin_base::ControllerBase
Public Functions
-
inline Plugin()
-
inline ~Plugin()
-
virtual void ownInitialize() override
Virtual functions from ControllerBase
-
virtual void updateState(const geometry_msgs::msg::PoseStamped &pose_msg, const geometry_msgs::msg::TwistStamped &twist_msg) override
-
virtual void updateReference(const as2_msgs::msg::TrajectorySetpoints &ref) override
-
virtual bool setMode(const as2_msgs::msg::ControlMode &mode_in, const as2_msgs::msg::ControlMode &mode_out) override
-
virtual bool computeOutput(double dt, geometry_msgs::msg::PoseStamped &pose, geometry_msgs::msg::TwistStamped &twist, as2_msgs::msg::Thrust &thrust) override
-
virtual void reset() override
Private Functions
-
bool checkParamList(const std::string ¶m, std::vector<std::string> &_params_list)
Controller especific functions
-
inline void resetState()
-
void resetReferences()
-
void resetCommands()
-
void computeActions(geometry_msgs::msg::PoseStamped &pose, geometry_msgs::msg::TwistStamped &twist, as2_msgs::msg::Thrust &thrust)
-
bool getOutput(geometry_msgs::msg::TwistStamped &twist_msg, as2_msgs::msg::Thrust &thrust_msg)
-
Eigen::Vector3d getForce(const double &_dt, const Eigen::Vector3d &_pos_state, const Eigen::Vector3d &_vel_state, const Eigen::Vector3d &_pos_reference, const Eigen::Vector3d &_vel_reference, const Eigen::Vector3d &_acc_reference)
-
Acro_command computeTrajectoryControl(const double &_dt, const Eigen::Vector3d &_pos_state, const Eigen::Vector3d &_vel_state, const tf2::Quaternion &_attitude_state, const Eigen::Vector3d &_pos_reference, const Eigen::Vector3d &_vel_reference, const Eigen::Vector3d &_acc_reference, const double &_yaw_angle_reference)
Private Members
-
UAV_reference control_ref_
-
Acro_command control_command_
-
Control_flags flags_
-
bool hover_flag_ = false
-
as2_msgs::msg::ControlMode control_mode_in_
-
as2_msgs::msg::ControlMode control_mode_out_
-
Eigen::Matrix3d Kp_ = {Eigen::Matrix3d::Zero()}
-
Eigen::Matrix3d Kd_ = {Eigen::Matrix3d::Zero()}
-
Eigen::Matrix3d Ki_ = {Eigen::Matrix3d::Zero()}
-
Eigen::Matrix3d Kp_ang_mat_ = {Eigen::Matrix3d::Zero()}
-
Eigen::Vector3d accum_pos_error_ = {Eigen::Vector3d::Zero()}
-
double mass_
-
double antiwindup_cte_ = 0.0
-
const Eigen::Vector3d gravitational_accel_ = Eigen::Vector3d(0, 0, -9.81)
-
const std::vector<std::string> parameters_list_ = {"mass", "trajectory_control.antiwindup_cte", "trajectory_control.alpha", "trajectory_control.kp.x", "trajectory_control.kp.y", "trajectory_control.kp.z", "trajectory_control.ki.x", "trajectory_control.ki.y", "trajectory_control.ki.z", "trajectory_control.kd.x", "trajectory_control.kd.y", "trajectory_control.kd.z", "trajectory_control.roll_control.kp", "trajectory_control.pitch_control.kp", "trajectory_control.yaw_control.kp",}
-
std::vector<std::string> parameters_to_read_ = {parameters_list_}
-
inline Plugin()
-
class Plugin : public follow_path_base::FollowPathBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::FollowPath::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::FollowPath::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline virtual Eigen::Vector3d getTargetPosition() override
Private Functions
-
inline bool checkGoalCondition()
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::PositionMotion> position_motion_handler_ = nullptr
-
double initial_yaw_
-
geometry_msgs::msg::PoseStamped desired_pose_
-
geometry_msgs::msg::TwistStamped desired_twist_
-
inline virtual void ownInit()
-
class Plugin : public follow_path_base::FollowPathBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::FollowPath::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::FollowPath::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline virtual Eigen::Vector3d getTargetPosition() override
-
inline void result_callback(const GoalHandleTrajectoryGenerator::WrappedResult &result)
Private Types
-
using TrajectoryGeneratorAction = as2_msgs::action::GeneratePolynomialTrajectory
-
using GoalHandleTrajectoryGenerator = rclcpp_action::ClientGoalHandle<TrajectoryGeneratorAction>
Private Functions
-
inline as2_msgs::action::GeneratePolynomialTrajectory::Goal followPathGoalToTrajectoryGeneratorGoal(const as2_msgs::action::FollowPath::Goal &_goal)
Private Members
-
std::shared_ptr<rclcpp_action::Client<TrajectoryGeneratorAction>> traj_gen_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr traj_gen_pause_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr traj_gen_resume_client_ = nullptr
-
rclcpp_action::Client<TrajectoryGeneratorAction>::SendGoalOptions traj_gen_goal_options_
-
std::shared_future<GoalHandleTrajectoryGenerator::SharedPtr> traj_gen_goal_handle_future_
-
bool traj_gen_goal_accepted_ = false
-
bool traj_gen_result_received_ = false
-
bool traj_gen_result_ = false
-
geometry_msgs::msg::Pose desired_pose_
-
inline virtual void ownInit()
-
class Plugin : public go_to_base::GoToBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::GoToWaypoint::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::GoToWaypoint::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
Private Functions
-
inline bool checkGoalCondition()
-
inline float getActualYaw()
-
inline bool computeYaw(const uint8_t yaw_mode, const geometry_msgs::msg::Point &target, const geometry_msgs::msg::Point &actual, float &yaw)
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::PositionMotion> position_motion_handler_ = nullptr
-
inline virtual void ownInit()
-
class Plugin : public go_to_base::GoToBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::GoToWaypoint::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::GoToWaypoint::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline void result_callback(const GoalHandleTrajectoryGenerator::WrappedResult &result)
Private Types
-
using TrajectoryGeneratorAction = as2_msgs::action::GeneratePolynomialTrajectory
-
using GoalHandleTrajectoryGenerator = rclcpp_action::ClientGoalHandle<TrajectoryGeneratorAction>
Private Functions
-
inline as2_msgs::action::GeneratePolynomialTrajectory::Goal goToGoalToTrajectoryGeneratorGoal(const as2_msgs::action::GoToWaypoint::Goal &_goal)
Private Members
-
std::shared_ptr<rclcpp_action::Client<TrajectoryGeneratorAction>> traj_gen_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr traj_gen_pause_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr traj_gen_resume_client_ = nullptr
-
rclcpp_action::Client<TrajectoryGeneratorAction>::SendGoalOptions traj_gen_goal_options_
-
std::shared_future<GoalHandleTrajectoryGenerator::SharedPtr> traj_gen_goal_handle_future_
-
TrajectoryGeneratorAction::Feedback traj_gen_feedback_
-
bool traj_gen_goal_accepted_ = false
-
bool traj_gen_result_received_ = false
-
bool traj_gen_result_ = false
-
inline virtual void ownInit()
-
class Plugin : public as2_state_estimator_plugin_base::StateEstimatorBase
-
Private Functions
-
inline void generate_map_frame_from_ground_truth_pose(const geometry_msgs::msg::PoseStamped &pose)
Private Members
-
bool use_gps_ = false
-
bool set_origin_on_start_ = false
-
bool earth_to_map_set_ = false
-
double origin_lat_ = 0.0
-
double origin_lon_ = 0.0
-
double origin_alt_ = 0.0
-
geometry_msgs::msg::TransformStamped earth_to_map_
-
geographic_msgs::msg::GeoPoint::UniquePtr origin_
-
sensor_msgs::msg::NavSatFix::UniquePtr gps_pose_
-
bool using_gazebo_tf_ = false
-
inline void generate_map_frame_from_ground_truth_pose(const geometry_msgs::msg::PoseStamped &pose)
-
class Plugin : public as2_state_estimator_plugin_base::StateEstimatorBase
-
Private Functions
Computes the transformation from the map frame to the odometry frame using Eigen::Isometry3d.
- Parameters:
odom – The odometry data.
ground_truth – The ground truth pose data.
- Returns:
geometry_msgs::msg::TransformStamped The transformation from the map to odom frame.
Callback for the odometry topic.
- Parameters:
msg – Odometry message
Callback for the ground truth topic.
- Parameters:
msg – PoseStamped message
Callback for the rigid bodies topic.
- Parameters:
msg – RigidBodies message
Private Members
-
geometry_msgs::msg::PoseStamped::SharedPtr ground_truth_ = nullptr
-
nav_msgs::msg::Odometry::SharedPtr odom_ = nullptr
-
geometry_msgs::msg::TransformStamped earth_to_map_
-
geometry_msgs::msg::TransformStamped map_to_odom_
-
geometry_msgs::msg::TransformStamped odom_to_baselink_
-
bool map_to_earth_set_ = false
-
class Plugin : public land_base::LandBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Land::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline virtual void ownInit()
-
class Plugin : public land_base::LandBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Land::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::Land::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
Private Functions
-
inline bool checkGoalCondition()
-
inline virtual void ownInit()
-
class Plugin : public land_base::LandBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Land::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::Land::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline void result_callback(const GoalHandleTrajectoryGenerator::WrappedResult &result)
Private Types
-
using TrajectoryGeneratorAction = as2_msgs::action::GeneratePolynomialTrajectory
-
using GoalHandleTrajectoryGenerator = rclcpp_action::ClientGoalHandle<TrajectoryGeneratorAction>
Private Functions
-
inline bool checkGoalCondition()
-
inline as2_msgs::action::GeneratePolynomialTrajectory::Goal landGoalToTrajectoryGeneratorGoal(const as2_msgs::action::Land::Goal &_goal)
Private Members
-
std::shared_ptr<rclcpp_action::Client<TrajectoryGeneratorAction>> traj_gen_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr traj_gen_pause_client_ = nullptr
-
as2::SynchronousServiceClient<std_srvs::srv::Trigger>::SharedPtr traj_gen_resume_client_ = nullptr
-
rclcpp_action::Client<TrajectoryGeneratorAction>::SendGoalOptions traj_gen_goal_options_
-
std::shared_future<GoalHandleTrajectoryGenerator::SharedPtr> traj_gen_goal_handle_future_
-
TrajectoryGeneratorAction::Feedback traj_gen_feedback_
-
bool traj_gen_goal_accepted_ = false
-
bool traj_gen_result_received_ = false
-
bool traj_gen_result_ = false
-
double land_speed_condition_percentage_
-
double land_speed_condition_height_
-
float speed_condition_
-
int time_condition_ = 1
-
float initial_height_
-
float land_height_ = -10.0f
-
inline virtual void ownInit()
-
class Plugin : public as2_state_estimator_plugin_base::StateEstimatorBase
-
Public Members
-
geometry_msgs::msg::TwistStamped twist_msg_
Private Members
-
tf2::Transform earth_to_map_ = tf2::Transform::getIdentity()
-
const tf2::Transform map_to_odom_ = tf2::Transform::getIdentity()
-
tf2::Transform odom_to_base_ = tf2::Transform::getIdentity()
-
bool has_earth_to_map_ = false
-
double twist_alpha_ = 1.0
-
double orientation_alpha_ = 1.0
-
geometry_msgs::msg::PoseStamped last_pose_msg_
-
geometry_msgs::msg::TwistStamped twist_msg_
-
class Plugin : public as2_motion_controller_plugin_base::ControllerBase
Public Functions
-
inline Plugin()
-
inline ~Plugin()
-
virtual void ownInitialize() override
-
virtual void updateState(const geometry_msgs::msg::PoseStamped &pose_msg, const geometry_msgs::msg::TwistStamped &twist_msg) override
-
virtual void updateReference(const geometry_msgs::msg::PoseStamped &ref) override
-
virtual void updateReference(const geometry_msgs::msg::TwistStamped &ref) override
-
virtual void updateReference(const as2_msgs::msg::TrajectorySetpoints &ref) override
-
virtual bool setMode(const as2_msgs::msg::ControlMode &mode_in, const as2_msgs::msg::ControlMode &mode_out) override
-
virtual bool computeOutput(double dt, geometry_msgs::msg::PoseStamped &pose, geometry_msgs::msg::TwistStamped &twist, as2_msgs::msg::Thrust &thrust) override
-
virtual void reset() override
Private Types
-
using PID = pid_controller::PID<double>
-
using PID_1D = pid_1d_controller::PID<double>
Private Functions
-
void checkParamList(const std::string ¶m, std::vector<std::string> &_params_list, bool &_all_params_read)
-
void updateControllerParameter(PID_1D &_pid_handler, const std::string &_parameter_name, const rclcpp::Parameter &_param)
-
void updateController3DParameter(PID &_pid_handler, const std::string &_parameter_name, const rclcpp::Parameter &_param)
-
void updateSpeedInAPlaneParameter(PID_1D &_pid_1d_handler, PID &_pid_3d_handler, const std::string &_parameter_name, const rclcpp::Parameter &_param)
-
void resetState()
-
void resetReferences()
-
void resetCommands()
-
bool getOutput(geometry_msgs::msg::TwistStamped &twist_msg)
Private Members
-
as2_msgs::msg::ControlMode control_mode_in_
-
as2_msgs::msg::ControlMode control_mode_out_
-
Control_flags flags_
-
const std::vector<std::string> position_control_parameters_list_ = {"position_control.reset_integral", "position_control.antiwindup_cte", "position_control.alpha", "position_control.kp.x", "position_control.kp.y", "position_control.kp.z", "position_control.ki.x", "position_control.ki.y", "position_control.ki.z", "position_control.kd.x", "position_control.kd.y", "position_control.kd.z"}
-
const std::vector<std::string> velocity_control_parameters_list_ = {"speed_control.reset_integral", "speed_control.antiwindup_cte", "speed_control.alpha", "speed_control.kp.x", "speed_control.kp.y", "speed_control.kp.z", "speed_control.ki.x", "speed_control.ki.y", "speed_control.ki.z", "speed_control.kd.x", "speed_control.kd.y", "speed_control.kd.z"}
-
const std::vector<std::string> speed_in_a_plane_control_parameters_list_ = {"speed_in_a_plane_control.reset_integral", "speed_in_a_plane_control.antiwindup_cte", "speed_in_a_plane_control.alpha", "speed_in_a_plane_control.height.kp", "speed_in_a_plane_control.height.ki", "speed_in_a_plane_control.height.kd", "speed_in_a_plane_control.speed.kp.x", "speed_in_a_plane_control.speed.kp.y", "speed_in_a_plane_control.speed.ki.x", "speed_in_a_plane_control.speed.ki.y", "speed_in_a_plane_control.speed.kd.x", "speed_in_a_plane_control.speed.kd.y"}
-
const std::vector<std::string> trajectory_control_parameters_list_ = {"trajectory_control.reset_integral", "trajectory_control.antiwindup_cte", "trajectory_control.alpha", "trajectory_control.kp.x", "trajectory_control.kp.y", "trajectory_control.kp.z", "trajectory_control.ki.x", "trajectory_control.ki.y", "trajectory_control.ki.z", "trajectory_control.kd.x", "trajectory_control.kd.y", "trajectory_control.kd.z"}
-
const std::vector<std::string> yaw_control_parameters_list_ = {"yaw_control.reset_integral", "yaw_control.antiwindup_cte", "yaw_control.alpha", "yaw_control.kp", "yaw_control.ki", "yaw_control.kd"}
-
std::vector<std::string> plugin_parameters_to_read_ = {plugin_parameters_list_}
-
std::vector<std::string> position_control_parameters_to_read_ = {position_control_parameters_list_}
-
std::vector<std::string> velocity_control_parameters_to_read_ = {velocity_control_parameters_list_}
-
std::vector<std::string> speed_in_a_plane_control_parameters_to_read_{speed_in_a_plane_control_parameters_list_}
-
std::vector<std::string> trajectory_control_parameters_to_read_{trajectory_control_parameters_list_}
-
std::vector<std::string> yaw_control_parameters_to_read_ = {yaw_control_parameters_list_}
-
UAV_command control_command_
-
bool hover_flag_ = false
-
Eigen::Vector3d speed_limits_
-
double yaw_speed_limit_
-
bool use_bypass_ = true
-
bool proportional_limitation_ = false
-
std::string input_pose_frame_id_ = enu_frame_id_
-
std::string input_twist_frame_id_ = enu_frame_id_
-
std::string output_twist_frame_id_ = enu_frame_id_
-
inline Plugin()
-
class Plugin : public as2_state_estimator_plugin_base::StateEstimatorBase
-
Private Functions
Private Members
-
bool use_gps_ = false
-
bool set_origin_on_start_ = false
-
double earth_to_map_height_ = 0.0
-
double origin_lat_ = 0.0
-
double origin_lon_ = 0.0
-
double origin_alt_ = 0.0
-
bool set_map_to_odom_ = true
-
geometry_msgs::msg::TransformStamped earth_to_map_
-
geographic_msgs::msg::GeoPoint::UniquePtr origin_
-
sensor_msgs::msg::NavSatFix::UniquePtr gps_pose_
-
bool use_gps_ = false
-
class Plugin : public as2_map_server_plugin_base::MapServerBase
-
Private Functions
-
std::vector<int8_t> add_occ_grid_update(const std::vector<int8_t> &update, const std::vector<int8_t> &occ_grid_data)
-
nav_msgs::msg::OccupancyGrid img_to_grid(const cv::Mat img, const std_msgs::msg::Header &header, double grid_resolution)
-
std::vector<int8_t> add_occ_grid_update(const std::vector<int8_t> &update, const std::vector<int8_t> &occ_grid_data)
-
class Plugin : public takeoff_base::TakeoffBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline virtual void ownInit()
-
class Plugin : public takeoff_base::TakeoffBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
Private Functions
-
inline bool checkGoalCondition()
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::PositionMotion> position_motion_handler_ = nullptr
-
geometry_msgs::msg::Point takeoff_position_
-
double takeoff_angle_
-
inline virtual void ownInit()
-
class Plugin : public takeoff_base::TakeoffBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
Private Functions
-
inline bool checkGoalCondition()
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::SpeedMotion> speed_motion_handler_ = nullptr
-
inline virtual void ownInit()
-
class Plugin : public takeoff_base::TakeoffBase
Public Functions
-
inline virtual void ownInit()
-
inline virtual bool own_activate(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual bool own_modify(as2_msgs::action::Takeoff::Goal &_goal) override
-
inline virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline virtual as2_behavior::ExecutionStatus own_run() override
-
inline void result_callback(const GoalHandleTrajectoryGenerator::WrappedResult &result)
Private Types
-
using TrajectoryGeneratorAction = as2_msgs::action::GeneratePolynomialTrajectory
-
using GoalHandleTrajectoryGenerator = rclcpp_action::ClientGoalHandle<TrajectoryGeneratorAction>
Private Functions
-
inline as2_msgs::action::GeneratePolynomialTrajectory::Goal takeoffGoalToTrajectoryGeneratorGoal(const as2_msgs::action::Takeoff::Goal &_goal)
Private Members
-
std::shared_ptr<rclcpp_action::Client<TrajectoryGeneratorAction>> traj_gen_client_ = nullptr
-
rclcpp_action::Client<TrajectoryGeneratorAction>::SendGoalOptions traj_gen_goal_options_
-
std::shared_future<GoalHandleTrajectoryGenerator::SharedPtr> traj_gen_goal_handle_future_
-
TrajectoryGeneratorAction::Feedback traj_gen_feedback_
-
bool traj_gen_goal_accepted_ = false
-
bool traj_gen_result_received_ = false
-
bool traj_gen_result_ = false
-
inline virtual void ownInit()
-
class Plugin : public gripper_behavior_plugin_base::GripperBase
Public Functions
-
virtual void ownInit() override
-
virtual bool own_activate(as2_msgs::action::GripperHandler::Goal &_goal) override
-
virtual bool own_modify(as2_msgs::action::GripperHandler::Goal &_goal) override
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) override
-
virtual as2_behavior::ExecutionStatus own_run() override
-
virtual void ownInit() override
-
class Plugin : public as2_behaviors_path_planning::PluginBase
Public Functions
-
virtual bool on_deactivate() override
-
virtual bool on_modify() override
-
virtual bool on_pause() override
-
virtual bool on_resume() override
-
virtual void on_execution_end() override
-
virtual as2_behavior::ExecutionStatus on_run() override
Private Members
-
DynamicVoronoi dynamic_voronoi_
-
unsigned int last_size_x_ = 0
-
unsigned int last_size_y_ = 0
-
VoronoiSearcher graph_searcher_
-
nav_msgs::msg::OccupancyGrid last_occ_grid_
-
nav_msgs::msg::OccupancyGrid last_dist_field_grid_
-
bool enable_visualization_
-
virtual bool on_deactivate() override
-
class PluginBase
Subclassed by a_star::Plugin, voronoi::Plugin
Public Functions
-
virtual bool on_deactivate() = 0
-
virtual bool on_modify() = 0
-
virtual bool on_pause() = 0
-
virtual bool on_resume() = 0
-
virtual void on_execution_end() = 0
-
virtual as2_behavior::ExecutionStatus on_run() = 0
-
inline virtual ~PluginBase()
Protected Functions
-
inline PluginBase()
-
virtual bool on_deactivate() = 0
-
class Point2i
- #include <cell_node.hpp>
Point2i class, an integer 2d point.
-
class PointGimbalBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::PointGimbal>
Public Functions
-
virtual ~PointGimbalBehavior() = default
Protected Functions
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
bool check_gimbal_limits(const double roll, const double pitch, const double yaw)
-
bool update_gimbal_state()
-
bool point_check_finished()
-
bool move_check_finished(as2_msgs::msg::GimbalControl target, geometry_msgs::msg::Vector3Stamped current)
Private Members
-
double gimbal_threshold_
-
double gimbal_roll_min_
-
double gimbal_roll_max_
-
double gimbal_pitch_min_
-
double gimbal_pitch_max_
-
double gimbal_yaw_min_
-
double gimbal_yaw_max_
-
geometry_msgs::msg::PointStamped desired_goal_position_
-
geometry_msgs::msg::PointStamped current_goal_position_
-
geometry_msgs::msg::Vector3Stamped gimbal_angles_current_
-
geometry_msgs::msg::Vector3Stamped gimbal_angles_offset_
-
as2_msgs::msg::GimbalControl gimbal_control_msg_
-
virtual ~PointGimbalBehavior() = default
-
class PositionMotion : public as2::motionReferenceHandlers::BasicMotionReferenceHandler
- #include <position_motion.hpp>
The PositionMotion class is a motion reference handler that moves the robot to a given position.
Public Functions
-
explicit PositionMotion(as2::Node *node_ptr, const std::string &ns = "")
PositionMotion Constructor.
- Parameters:
node – as2::Node pointer.
-
inline ~PositionMotion()
PositionMotion Destructor.
-
bool ownSendCommand()
ownSendCommand sends the pose and twist messages.
- Returns:
true if commands was sent successfully, false otherwise.
-
bool sendPositionCommandWithYawAngle(const std::string &frame_id_pose, const float &x, const float &y, const float &z, const float &yaw_angle, const std::string &frame_id_twist, const float &vx, const float &vy, const float &vz)
sendPositionCommandWithYawAngle sends a position command to the robot. The yaw angle is given in radians. The linear velocity limitation is given in m/s. The position command and the velocity limitation are sent in the input frame id.
- Parameters:
frame_id_pose – frame id of the position command.
x – x coordinate of the position command.
y – y coordinate of the position command.
z – z coordinate of the position command.
yaw_angle – yaw angle of the position command.
frame_id_twist – frame id of the velocity limitation.
vx – linear velocity limitation in x direction.
vy – linear velocity limitation in y direction.
vz – linear velocity limitation in z direction.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendPositionCommandWithYawAngle(const std::string &frame_id_pose, const float &x, const float &y, const float &z, const geometry_msgs::msg::Quaternion &q, const std::string &frame_id_twist, const float &vx, const float &vy, const float &vz)
sendPositionCommandWithYawAngle sends a position command to the robot. The yaw angle is given in a quaternion. The linear velocity is given in m/s. The position command and the velocity limitation are sent in the input frame id.
- Parameters:
frame_id_pose – frame id of the position command.
x – x coordinate of the position command.
y – y coordinate of the position command.
z – z coordinate of the position command.
q – quaternion of the position command. (with the desired yaw angle).
frame_id_twist – frame id of the velocity limitation.
vx – linear velocity limitation in x direction.
vy – linear velocity limitation in y direction.
vz – linear velocity limitation in z direction.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendPositionCommandWithYawAngle(const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::TwistStamped &twist)
sendPositionCommandWithYawAngle sends a position command to the robot. The position command is sent in the frame id frame.
- Parameters:
pose – geometry_msgs::msg::PoseStamped with the desired position and yaw angle.
twist – geometry_msgs::msg::TwistStamped with the desired linear velocity.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendPositionCommandWithYawSpeed(const std::string &frame_id_pose, const float &x, const float &y, const float &z, const float &yaw_speed, const std::string &frame_id_twist, const float &vx, const float &vy, const float &vz)
sendPositionCommandWithYawSpeed sends a position command to the robot. The yaw speed is given in rad/s. The linear velocity is given in m/s. The position command and the velocity limitation are sent in the input frame id.
- Parameters:
frame_id_pose – frame id of the position command.
x – x coordinate of the position command.
y – y coordinate of the position command.
z – z coordinate of the position command.
yaw_speed – yaw speed of the position command.
frame_id_twist – frame id of the velocity limitation.
vx – linear velocity limitation in x direction.
vy – linear velocity limitation in y direction.
vz – linear velocity limitation in z direction.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendPositionCommandWithYawSpeed(const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::TwistStamped &twist)
sendPositionCommandWithYawSpeed sends a position command to the robot. The position command is sent in the frame id frame.
- Parameters:
x – pose geometry_msgs::msg::PoseStamped with the desired position.
twist – geometry_msgs::msg::TwistStamped with the desired linear velocity and yaw speed.
- Returns:
true if the command was sent successfully, false otherwise.
-
explicit PositionMotion(as2::Node *node_ptr, const std::string &ns = "")
-
struct Quaternion
-
class RateBase
Subclassed by as2::rate::GenericRate< Clock >
-
class RealsenseInterface : public as2::Node
Public Functions
-
explicit RealsenseInterface(const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
Constructor of the RealsenseInterface object.
-
void stop()
Stop rutine for odometry node. This function stops the pipeline.
-
void run()
Funtionality during node lifetime. This function gets the sensor measurements from realsense device and publish them.
Private Functions
-
bool setup()
-
void runImu(const rs2::motion_frame &accel_frame, const rs2::motion_frame &gyro_frame)
-
void runPose(const rs2::pose_frame &pose_frame)
-
void runOdom(const rs2::pose_frame &pose_frame)
-
void runColor(const rs2::video_frame &color_frame)
-
void runDepth(const rs2::video_frame &depth_frame)
-
bool identifyDevice()
-
bool identifySensors(const rs2::device &dev)
Private Members
-
bool verbose_
-
bool device_not_found_
-
bool imu_available_
-
bool depth_available_
-
bool color_available_
-
bool fisheye_available_
-
bool pose_available_
-
rs2::pipeline pipe_
-
geometry_msgs::msg::TransformStamped rs_odom2rs_link_tf_
-
tf2::Transform base_link_to_realsense_link_
-
tf2::Transform base_link_to_realsense_pose_odom_
-
tf2::Transform realsense_link_to_realsense_pose_
-
tf2::Transform realsense_link_to_realsense_pose_odom_
-
tf2::Transform realsense_pose_
-
explicit RealsenseInterface(const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
-
struct Rotor
- #include <Parameters.hpp>
A struct that holds various properties of a rotor.
Public Members
-
double angle
The angle formed on the xy plane by the vector going from the the center of mass to the rotor. The angle is measured from the +x axis of the body frame.
-
double armLength
The length of the vector going from the center of mass to the rotor.
-
double forceConstant
A constant that multiplies with the square of the rotor’s velocity to compute its thrust.
-
double momentConstant
A constant the multiplies with the rotor’s thrust to compute its moment.
-
int direction
Direction of rotation of the rotor. +1 is counterclockwise and -1 is clockwise.
-
double angle
-
template<typename T>
class Sensor : public as2::sensors::TFStatic, protected as2::sensors::GenericSensor, public as2::sensors::SensorData<T> - #include <sensor.hpp>
Sensor handler to publish sensor data at a given frequency.
Public Functions
-
inline Sensor(const std::string &id, as2::Node *node_ptr, float pub_freq = -1.0f, bool add_sensor_measurements_base = true)
Construct a new Sensor object.
- Parameters:
id – Sensor ID
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
-
inline Sensor(const std::string &id, as2::Node *node_ptr, int pub_freq, bool add_sensor_measurements_base = true)
Construct a new Sensor object.
- Parameters:
id – Sensor ID
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
-
inline Sensor(const std::string &id, as2::Node *node_ptr, double pub_freq, bool add_sensor_measurements_base = true)
Construct a new Sensor object.
- Parameters:
id – Sensor ID
node_ptr – Pointer to the node
pub_freq – Frequency to publish the data (-1 to publish every time updateData is called)
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
Protected Functions
-
inline virtual void publishData() override
Publish the data in a topic.
-
inline Sensor(const std::string &id, as2::Node *node_ptr, float pub_freq = -1.0f, bool add_sensor_measurements_base = true)
-
template<typename T>
class SensorData - #include <sensor.hpp>
SensorData object to publish data in a topic.
- Template Parameters:
T – Type of the message
Subclassed by as2::sensors::Sensor< T >
Public Functions
-
inline explicit SensorData(const std::string &topic_name, rclcpp::Node *node_ptr, bool add_sensor_measurements_base = true)
Construct a new GenericSensor object.
- Parameters:
node_ptr – Pointer to the node
-
inline virtual ~SensorData()
Destroy the GenericSensor object.
-
inline void publish()
Publish the data stored in the message.
-
inline void updateAndPublish(const T &msg)
Update the message value and publish it.
- Parameters:
msg – Message
Public Static Functions
-
static inline std::string processTopicName(const std::string &topic_name, bool add_sensor_measurements_base = true)
Process the topic name with the sensor measurements base.
- Parameters:
topic_name – Topic name
add_sensor_measurements_base – Add “sensor_measurements” to the topic name
- Returns:
std::string Processed topic name
-
class SetArmingStateBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::SetArmingState>
Public Functions
-
inline SetArmingStateBehavior()
-
inline virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline SetArmingStateBehavior()
-
class SetEntityPoseBridge : public rclcpp::Node
Public Functions
-
SetEntityPoseBridge()
Private Functions
-
SetEntityPoseBridge()
-
class SetOffboardModeBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::SetOffboardMode>
Public Functions
-
inline SetOffboardModeBehavior()
-
inline virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
-
inline SetOffboardModeBehavior()
-
class SetOrigin : public as2_behavior_tree::BtServiceNode<as2_msgs::srv::SetOrigin>
Public Functions
-
virtual void on_tick() override
Function to perform some user-defined operation on tick Fill in service request with information if necessary.
-
virtual void on_tick() override
-
class SpeedInAPlaneMotion : public as2::motionReferenceHandlers::BasicMotionReferenceHandler
- #include <speed_in_a_plane_motion.hpp>
The SpeedInAPlaneMotion class is a motion reference handler that moves the robot at a given speed.
Public Functions
-
explicit SpeedInAPlaneMotion(as2::Node *node_ptr, const std::string &ns = "")
PositionMotion Constructor.
- Parameters:
node – as2::Node pointer.
-
inline ~SpeedInAPlaneMotion()
PositionMotion Destructor.
-
bool ownSendCommand()
ownSendCommand sends pose and twist messages.
- Returns:
true if commands was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawSpeed(const std::string &frame_id_speed, const float vx, const float vy, const std::string &frame_id_pose, const float hz, const float yaw_speed)
sendSpeedInAPlaneCommandWithYawAngle sends a speed in a plane command to the robot with a yaw speed. The speed plane command is sent in the frame id frame. The linear velocity is given in m/s. The height command is sent in the frame id frame. The height is given in m.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
frame_id_yaw – frame id of the height and yaw angle command.
hz – Height in the z axis.
yaw_speed – Yaw speed in radians/s.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawSpeed(const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::TwistStamped &twist)
sendSpeedInAPlaneCommandWithYawAngle sends a speed in a plane command to the robot with a yaw speed. The speed plane command is sent in the frame id frame. The linear velocity is given in m/s. The height command is sent in the frame id frame. The height is given in m.
- Parameters:
pose – PoseStamped message that represents the height.
twist – TwistStamped message that represents the linear velocity and yaw speed.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawAngle(const std::string &frame_id_speed, const float vx, const float vy, const std::string &frame_id_pose, const float hz, const float yaw_angle)
sendSpeedInAPlaneCommandWithYawAngle sends a speed in a plane command to the robot with a yaw angle. The speed plane command is sent in the frame id frame. The linear velocity is given in m/s. The height command is sent in the frame id frame. The height is given in m.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
frame_id_yaw – frame id of the height and yaw angle command.
hz – Height in the z axis.
yaw_angle – Yaw angle in radians.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawAngle(const std::string &frame_id_speed, const float vx, const float vy, const std::string &frame_id_pose, const float hz, const geometry_msgs::msg::Quaternion &q)
sendSpeedInAPlaneCommandWithYawAngle sends a speed in a plane command to the robot with a yaw angle. The speed plane command is sent in the frame id frame. The linear velocity is given in m/s. The height command is sent in the frame id frame. The height is given in m.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
frame_id_yaw – frame id of the height and yaw angle command.
hz – Height in the z axis.
q – Quaternion that represents the yaw angle.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawAngle(const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::TwistStamped &twist)
sendSpeedInAPlaneCommandWithYawAngle sends a speed in a plane command to the robot with a yaw angle. The speed plane command is sent in the frame id frame. The linear velocity is given in m/s. The height command is sent in the frame id frame. The height is given in m.
- Parameters:
pose – PoseStamped message that represents the height and yaw angle.
twist – TwistStamped message that represents the linear velocity.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawAngle(const std::string &frame_id_speed, const float &vx, const float &vy, const std::string &frame_id_pose, const float &hz, const float &yaw_angle)
sendSpeedInAPlaneCommandWithYawAngle sends a speed command to the robot. The speed command is sent in the input frame id. The linear velocity is given in m/s.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
hz – Height in the z axis.
frame_id_yaw – frame id of the yaw angle command.
yaw_angle – Yaw angle in radians.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawAngle(const std::string &frame_id_speed, const float &vx, const float &vy, const std::string &frame_id_pose, const float &hz, const geometry_msgs::msg::Quaternion &q)
sendSpeedInAPlaneCommandWithYawAngle sends a speed command to the robot. The speed command is sent in the input frame id. The linear velocity is given in m/s.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
hz – Height in the z axis.
frame_id_yaw – frame id of the yaw angle command.
q – Quaternion that represents the yaw angle.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedInAPlaneCommandWithYawSpeed(const std::string &frame_id, const float &vx, const float &vy, const std::string &frame_id_pose, const float &hz, const float &yaw_speed)
sendSpeedInAPlaneCommandWithYawSpeed sends a speed command to the robot. The speed command is sent in the input frame id. The linear velocity is given in m/s. The yaw speed is given in rad/s.
- Parameters:
frame_id – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
vz – Linear velocity in the z axis.
yaw_speed – Yaw speed in rad/s.
- Returns:
true if the command was sent successfully, false otherwise.
-
explicit SpeedInAPlaneMotion(as2::Node *node_ptr, const std::string &ns = "")
-
class SpeedMotion : public as2::motionReferenceHandlers::BasicMotionReferenceHandler
- #include <speed_motion.hpp>
The SpeedMotion class is a motion reference handler that moves the robot at a given speed.
Public Functions
-
explicit SpeedMotion(as2::Node *node_ptr, const std::string &ns = "")
PositionMotion Constructor.
- Parameters:
node – as2::Node pointer.
-
inline ~SpeedMotion()
SpeedMotion Destructor.
-
bool ownSendCommand()
ownSendCommand sends pose and twist messages.
- Returns:
true if commands was sent successfully, false otherwise.
-
bool sendSpeedCommandWithYawAngle(const std::string &frame_id_speed, const float &vx, const float &vy, const float &vz, const std::string &frame_id_yaw, const float &yaw_angle)
sendSpeedCommandWithYawAngle sends a speed command to the robot. The speed command is sent in the input frame id. The linear velocity is given in m/s.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
vz – Linear velocity in the z axis.
frame_id_yaw – frame id of the yaw angle command.
yaw_angle – Yaw angle in radians.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedCommandWithYawAngle(const std::string &frame_id_speed, const float &vx, const float &vy, const float &vz, const std::string &frame_id_yaw, const geometry_msgs::msg::Quaternion &q)
sendSpeedCommandWithYawAngle sends a speed command to the robot. The speed command is sent in the input frame id. The linear velocity is given in m/s.
- Parameters:
frame_id_speed – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
vz – Linear velocity in the z axis.
frame_id_yaw – frame id of the yaw angle command.
q – Quaternion that represents the yaw angle.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedCommandWithYawAngle(const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::TwistStamped &twist)
sendSpeedCommandWithYawAngle sends a speed command to the robot. The speed command is sent in the frame id frame. The linear velocity is given in m/s.
- Parameters:
pose – PoseStamped message that represents the rotation .
twist – TwistStamped message that represents the linear velocity.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedCommandWithYawSpeed(const std::string &frame_id, const float &vx, const float &vy, const float &vz, const float &yaw_speed)
sendSpeedCommandWithYawSpeed sends a speed command to the robot. The speed command is sent in the input frame id. The linear velocity is given in m/s. The yaw speed is given in rad/s.
- Parameters:
frame_id – frame id of the velocity command.
vx – Linear velocity in the x axis.
vy – Linear velocity in the y axis.
vz – Linear velocity in the z axis.
yaw_speed – Yaw speed in rad/s.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendSpeedCommandWithYawSpeed(const geometry_msgs::msg::TwistStamped &twist)
sendSpeedCommandWithYawSpeed sends a speed command to the robot. The speed command is sent in the frame id frame. The linear velocity is given in m/s. The yaw speed is given in rad/s.
- Parameters:
twist – TwistStamped message that represents the linear velocity and the angular yaw speed
- Returns:
true if the command was sent successfully, false otherwise.
-
explicit SpeedMotion(as2::Node *node_ptr, const std::string &ns = "")
-
class StateEstimator : public as2::Node
Public Functions
-
inline ~StateEstimator()
Private Members
-
std::shared_ptr<pluginlib::ClassLoader<as2_state_estimator_plugin_base::StateEstimatorBase>> loader_
-
std::shared_ptr<as2_state_estimator_plugin_base::StateEstimatorBase> plugin_ptr_
-
inline ~StateEstimator()
-
class StateEstimatorBase
Subclassed by ground_truth::Plugin, ground_truth_odometry_fuse::Plugin, mocap_pose::Plugin, raw_odometry::Plugin
Public Functions
-
inline StateEstimatorBase()
-
virtual void on_setup() = 0
-
inline virtual bool get_earth_to_map_transform(geometry_msgs::msg::TransformStamped &transform)
Protected Functions
-
inline void check_standard_transform(const geometry_msgs::msg::TransformStamped &transform)
-
inline void publish_transform(const geometry_msgs::msg::TransformStamped &transform)
-
inline void publish_static_transform(const geometry_msgs::msg::TransformStamped &transform)
-
inline void publish_twist(const geometry_msgs::msg::TwistStamped &twist)
-
inline void publish_pose(const geometry_msgs::msg::PoseStamped &pose)
-
inline bool get_earth_to_map_transform(tf2::Transform &earth_to_map)
-
inline bool convert_earth_to_baselink_2_odom_to_baselink_transform(const tf2::Transform &earth_to_baselink, tf2::Transform &odom_to_baselink, const tf2::Transform &earth_to_map, const tf2::Transform &map_to_odom = tf2::Transform::getIdentity())
-
inline bool convert_odom_to_baselink_2_earth_to_baselink_transform(const tf2::Transform &odom_to_baselink, tf2::Transform &earth_to_baselink, const tf2::Transform &earth_to_map, const tf2::Transform &map_to_odom = tf2::Transform::getIdentity())
Protected Attributes
-
tf2::Transform odom_to_baselink
-
tf2::Transform earth_to_map
-
tf2::Transform map_to_odom
-
tf2::Transform earth_to_baselink
-
bool static_transforms_published_ = false
-
inline StateEstimatorBase()
-
struct StateMachineTransition
- #include <platform_state_machine.hpp>
Data Structure for defining the state machine transitions.
-
class SuctionGripperPlugin : public gz::sim::System, public gz::sim::ISystemConfigure, public gz::sim::ISystemPreUpdate
-
Public Members
-
std::unique_ptr<SuctionGripperPrivate> dataPtr
-
std::unique_ptr<SuctionGripperPrivate> dataPtr
-
class SuctionGripperPrivate
Public Functions
Public Members
-
gz::sim::Entity joint = {gz::sim::v8::kNullEntity}
Used to store the joint when we attach to an object.
-
bool suctionOn = {false}
Used for determining when the suction is on.
-
bool pendingJointCreation = {false}
Set to true when we detect the suction gripper is in contact.
-
bool jointCreated = {false}
True when we are holding an object.
-
gz::sim::Entity joint = {gz::sim::v8::kNullEntity}
-
class SwarmFlockingBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::SwarmFlocking>
Public Functions
-
SwarmFlockingBehavior()
-
inline ~SwarmFlockingBehavior()
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Public Members
Private Functions
-
bool setUpVirtualCentroid(const geometry_msgs::msg::PoseStamped &virtual_centroid)
Set up the virtual centroid of the swarm with offset in the desired frame.
- Parameters:
virtual_centroid – The virtual centroid of the swarm in the desired frame
- Returns:
bool Return true if the frame is not empty
-
bool setUpDronesFormation(geometry_msgs::msg::PoseStamped centroid, std::vector<std::string> drones_namespace, std::vector<as2_msgs::msg::PoseWithID> formation)
Set the drones reference in the swarm.
- Parameters:
centroid – The centroid of the swarm
drones_namespace – The namespaced of the drones
formation – The position of the drones in the swarm
- Returns:
bool Always true at the end of the function
-
bool initDroneReferences()
Active the followReference of the drones and check if the drones are ready to execute the action.
- Returns:
bool Return true if the drones are ready to execute
Check the followReference status of the drones.
- Parameters:
goal_future_handles – The goal future handles of the drones
- Returns:
as2_behavior::ExecutionStatus Return the status of the monitoring
-
void dynamicSwarmFormationCallback(as2_msgs::msg::PoseWithIDArray new_formation)
Callback to update the refrences of the drones inside the swarm.
- Parameters:
new_formation – The new formation of the swarm
Service to modify the virtual_centroid, add or detach a new drone reference within the swarm.
- Parameters:
request – The request of the service
response – The response of the service
Private Members
-
as2_msgs::action::SwarmFlocking::Goal goal_
-
as2_msgs::action::SwarmFlocking::Result result_
-
as2_msgs::action::SwarmFlocking::Feedback feedback_
-
std::shared_ptr<rclcpp::Service<as2_msgs::action::SwarmFlocking::Impl::SendGoalService>> modify_srv_ = nullptr
-
std::unordered_map<std::string, std::shared_ptr<DroneSwarm>> drones_
-
SwarmFlockingBehavior()
-
template<class ServiceT>
class SynchronousServiceClient - #include <synchronous_service_client.hpp>
Class for handling synchronous service clients in ROS2 without taking care about the spin() method.
Public Types
Public Functions
-
inline SynchronousServiceClient(std::string service_name, as2::Node *node)
Constructor.
- Parameters:
service_name – Name of the service
-
inline bool sendRequest(const RequestT &req, ResponseT &resp, int wait_time = 0)
Send Request synchronously to the service.
- Parameters:
request – Request to be sent to the service
respone – Response received from the service
wait_time – Time to wait for the service to be available in seconds
- Returns:
True if the service was called successfully, false otherwise
Send Request synchronously to the service.
- Parameters:
request – Request to be sent to the service
respone – Response received from the service
wait_time – Time to wait for the service to be available in seconds
- Returns:
True if the service was called successfully, false otherwise
-
inline SynchronousServiceClient(std::string service_name, as2::Node *node)
-
struct takeoff_plugin_params
-
class TakeoffAction : public as2_behavior_tree::BtActionNode<as2_msgs::action::Takeoff>
Public Functions
-
virtual void on_tick() override
Function to perform some user-defined operation on tick Could do dynamic checks, such as getting updates to values on the blackboard.
-
inline virtual BT::NodeStatus on_success()
Function to perform some user-defined operation upon successful completion of the action. Could put a value on the blackboard.
- Returns:
BT::NodeStatus Returns SUCCESS by default, user may override return another value
-
virtual void on_tick() override
-
class TakeoffBase
Subclassed by takeoff_plugin_platform::Plugin, takeoff_plugin_position::Plugin, takeoff_plugin_speed::Plugin, takeoff_plugin_trajectory::Plugin
Public Types
-
using GoalHandleTakeoff = rclcpp_action::ServerGoalHandle<as2_msgs::action::Takeoff>
Public Functions
-
inline TakeoffBase()
-
inline virtual ~TakeoffBase()
-
inline virtual void state_callback(geometry_msgs::msg::PoseStamped &pose_msg, geometry_msgs::msg::TwistStamped &twist_msg)
-
inline void on_execution_end(const as2_behavior::ExecutionStatus &state)
Protected Functions
-
inline virtual void ownInit()
-
virtual bool own_activate(as2_msgs::action::Takeoff::Goal &goal) = 0
-
inline virtual bool own_modify(as2_msgs::action::Takeoff::Goal &goal)
-
virtual void own_execution_end(const as2_behavior::ExecutionStatus &state) = 0
-
virtual as2_behavior::ExecutionStatus own_run() = 0
-
inline void sendHover()
Protected Attributes
-
as2_msgs::action::Takeoff::Goal goal_
-
as2_msgs::action::Takeoff::Feedback feedback_
-
as2_msgs::action::Takeoff::Result result_
-
takeoff_plugin_params params_
-
geometry_msgs::msg::PoseStamped actual_pose_
-
bool localization_flag_
Private Functions
-
inline bool processGoal(as2_msgs::action::Takeoff::Goal &_goal)
Private Members
-
std::shared_ptr<as2::motionReferenceHandlers::HoverMotion> hover_motion_handler_ = nullptr
-
using GoalHandleTakeoff = rclcpp_action::ServerGoalHandle<as2_msgs::action::Takeoff>
-
class TakeoffBehavior : public as2_behavior::BehaviorServer<as2_msgs::action::Takeoff>
Public Types
-
using GoalHandleTakeoff = rclcpp_action::ServerGoalHandle<as2_msgs::action::Takeoff>
-
using PSME = as2_msgs::msg::PlatformStateMachineEvent
Public Functions
-
~TakeoffBehavior()
-
bool sendEventFSME(const int8_t _event)
-
virtual void on_execution_end(const as2_behavior::ExecutionStatus &state) override
Private Members
-
std::shared_ptr<pluginlib::ClassLoader<takeoff_base::TakeoffBase>> loader_
-
std::shared_ptr<takeoff_base::TakeoffBase> takeoff_plugin_
-
as2::SynchronousServiceClient<as2_msgs::srv::SetPlatformStateMachineEvent>::SharedPtr platform_cli_
-
using GoalHandleTakeoff = rclcpp_action::ServerGoalHandle<as2_msgs::action::Takeoff>
-
class TeleopPanel : public rviz_common::Panel
Public Functions
-
explicit TeleopPanel(QWidget *parent = 0)
-
virtual void load(const rviz_common::Config &config)
-
virtual void save(rviz_common::Config config) const
Public Slots
-
void takeoff()
-
void land()
-
void disarm(const rclcpp_action::ClientGoalHandle<as2_msgs::action::Land>::WrappedResult &result)
-
void hover()
-
void kill()
-
void updateDroneNs()
Protected Attributes
-
QLineEdit *drone_editor_
-
QPushButton *takeoff_button_
-
QPushButton *land_button_
-
QPushButton *hover_button_
-
QPushButton *kill_button_
-
QString drone_namespace_
-
rclcpp_action::Client<as2_msgs::action::Takeoff>::SharedPtr takeoff_client_
-
rclcpp_action::Client<as2_msgs::action::Land>::SharedPtr land_client_
-
std::shared_ptr<as2::motionReferenceHandlers::HoverMotion> hover_handler_
-
explicit TeleopPanel(QWidget *parent = 0)
-
class TFDynamic
- #include <sensor.hpp>
TFDynamic object to publish dynamic transforms in TF.
Subclassed by as2::sensors::Gimbal
Public Functions
-
explicit TFDynamic(rclcpp::Node *node_ptr)
Construct a new TFDynamic object.
- Parameters:
node_ptr – Pointer to the node
-
virtual void setDynamicTransform(const geometry_msgs::msg::TransformStamped &transform)
Publish the transform.
- Parameters:
transform_msg – Transform message
-
virtual void setDynamicTransform(const std::string &frame_id, const std::string &parent_frame_id, float x, float y, float z, float qx, float qy, float qz, float qw)
Add a dynamic transform.
- Parameters:
frame_id – Frame ID
parent_frame_id – Parent Frame ID
x – X position (m)
y – Y position (m)
z – Z position (m)
qx – Quaternion X
qy – Quaternion Y
qz – Quaternion Z
qw – Quaternion W
-
virtual void setDynamicTransform(const std::string &frame_id, const std::string &parent_frame_id, float x, float y, float z, float roll, float pitch, float yaw)
Add a dynamic transform.
- Parameters:
frame_id – Frame ID
parent_frame_id – Parent Frame ID
x – X position (m)
y – Y position (m)
z – Z position (m)
roll – Roll (rad)
pitch – Pitch (rad)
yaw – Yaw (rad)
-
explicit TFDynamic(rclcpp::Node *node_ptr)
-
class TfHandler
- #include <tf_utils.hpp>
TfHandler class to handle the tf2_ros::Buffer and tf2_ros::TransformListener with ease inside a as2::Node class.
Public Functions
-
explicit TfHandler(as2::Node *_node)
Construct a new Tf Handler object.
- Parameters:
_node – an as2::Node object
-
void setTfTimeoutThreshold(double tf_timeout_threshold)
Set the tf timeout threshold.
- Parameters:
tf_timeout_threshold – double in seconds
-
void setTfTimeoutThreshold(const std::chrono::nanoseconds &tf_timeout_threshold)
Set the tf timeout threshold.
- Parameters:
tf_timeout_threshold – std::chrono::nanoseconds
-
double getTfTimeoutThreshold() const
Get the tf timeout threshold.
- Returns:
double
-
std::shared_ptr<tf2_ros::Buffer> getTfBuffer() const
Get the tf buffer object.
- Returns:
std::shared_ptr<tf2_ros::Buffer>
-
template<typename T>
inline T convert(const T &input, const std::string &target_frame, const std::chrono::nanoseconds timeout) convert a from one frame to another
- Parameters:
input – variable to convert
target_frame – the target frame
timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
variable in the target frame
-
template<typename T>
inline T convert(const T &input, const std::string &target_frame) convert a from one frame to another
- Parameters:
input – variable to convert
target_frame – the target frame
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
variable in the target frame
-
inline geometry_msgs::msg::TwistStamped convert(const geometry_msgs::msg::TwistStamped &_twist, const std::string &target_frame, const std::chrono::nanoseconds timeout)
-
inline geometry_msgs::msg::TwistStamped convert(const geometry_msgs::msg::TwistStamped &twist, const std::string &target_frame)
-
geometry_msgs::msg::PoseStamped getPoseStamped(const std::string &target_frame, const std::string &source_frame, const tf2::TimePoint &time, const std::chrono::nanoseconds timeout)
obtain a PoseStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in TimePoint
timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::PoseStamped
-
geometry_msgs::msg::PoseStamped getPoseStamped(const std::string &target_frame, const std::string &source_frame, const rclcpp::Time &time, const std::chrono::nanoseconds timeout)
obtain a PoseStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in Ros Time
timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::PoseStamped
-
geometry_msgs::msg::PoseStamped getPoseStamped(const std::string &target_frame, const std::string &source_frame, const tf2::TimePoint &time = tf2::TimePointZero)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in TimePoint
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::TransformStamped
-
geometry_msgs::msg::PoseStamped getPoseStamped(const std::string &target_frame, const std::string &source_frame, const rclcpp::Time &time)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in Ros Time
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::TransformStamped
-
geometry_msgs::msg::QuaternionStamped getQuaternionStamped(const std::string &target_frame, const std::string &source_frame, const tf2::TimePoint &time, const std::chrono::nanoseconds timeout)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in TimePoint
timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::QuaternionStamped
-
geometry_msgs::msg::QuaternionStamped getQuaternionStamped(const std::string &target_frame, const std::string &source_frame, const rclcpp::Time &time, const std::chrono::nanoseconds timeout)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in Ros Time
timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::QuaternionStamped
-
geometry_msgs::msg::QuaternionStamped getQuaternionStamped(const std::string &target_frame, const std::string &source_frame, const tf2::TimePoint &time = tf2::TimePointZero)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in TimePoint
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::QuaternionStamped
-
geometry_msgs::msg::QuaternionStamped getQuaternionStamped(const std::string &target_frame, const std::string &source_frame, const rclcpp::Time &time)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform in Ros Time
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::QuaternionStamped
-
geometry_msgs::msg::TransformStamped getTransform(const std::string &target_frame, const std::string &source_frame, const tf2::TimePoint &time = tf2::TimePointZero)
obtain a TransformStamped from the TF_buffer
- Parameters:
target_frame – the target frame
source_frame – the source frame
time – the time of the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
geometry_msgs::msg::QuaternionStamped
-
template<typename T>
inline bool tryConvert(T &input, const std::string &target_frame, const std::chrono::nanoseconds timeout) convert input to desired frame, checking if frames are valid
- Parameters:
input – a variable to get converted
target_frame – the target frame
timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
bool true if the conversion was successful
-
template<typename T>
inline bool tryConvert(T &input, const std::string &target_frame) convert to desired frame, checking if frames are valid
- Parameters:
input – a variable to get converted
target_frame – the target frame
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
bool true if the conversion was successful
-
std::pair<geometry_msgs::msg::PoseStamped, geometry_msgs::msg::TwistStamped> getState(const geometry_msgs::msg::TwistStamped &_twist, const std::string &_twist_target_frame, const std::string &_pose_target_frame, const std::string &_pose_source_frame, const std::chrono::nanoseconds timeout)
convert a geometry_msgs::msg::QuaternionStamped to desired frame, checking if frames are valid
- Parameters:
_quaternion – a geometry_msgs::msg::QuaternionStamped to get converted
_target_frame – the target frame
_timeout – the timeout for the transform
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
bool true if the conversion was successful
-
std::pair<geometry_msgs::msg::PoseStamped, geometry_msgs::msg::TwistStamped> getState(const geometry_msgs::msg::TwistStamped &_twist, const std::string &_twist_target_frame, const std::string &_pose_target_frame, const std::string &_pose_source_frame)
convert a geometry_msgs::msg::QuaternionStamped to desired frame, checking if frames are valid
- Parameters:
_quaternion – a geometry_msgs::msg::QuaternionStamped to get converted
_target_frame – the target frame
- Throws:
tf2::TransformException – if the transform is not available
- Returns:
bool true if the conversion was successful
-
explicit TfHandler(as2::Node *_node)
-
class TFStatic
- #include <sensor.hpp>
TFStatic object to publish static transforms in TF.
Subclassed by as2::sensors::Camera, as2::sensors::Gimbal, as2::sensors::Sensor< T >
Public Functions
-
virtual void setStaticTransform(const geometry_msgs::msg::TransformStamped &transformStamped)
Set the Static Transform in TF.
- Parameters:
transformStamped – TransformStamped message
-
virtual void setStaticTransform(const std::string &frame_id, const std::string &parent_frame_id, float x, float y, float z, float qx, float qy, float qz, float qw)
Set the Static Transform in TF.
- Parameters:
frame_id – Frame ID
parent_frame_id – Parent Frame ID
x – X position (m)
y – Y position (m)
z – Z position (m)
qx – Quaternion X
qy – Quaternion Y
qz – Quaternion Z
qw – Quaternion W
-
virtual void setStaticTransform(const std::string &frame_id, const std::string &parent_frame_id, float x, float y, float z, float roll, float pitch, float yaw)
Set the Static Transform in TF.
- Parameters:
frame_id – Frame ID
parent_frame_id – Parent Frame ID
x – X position (m)
y – Y position (m)
z – Z position (m)
roll – Roll (rad)
pitch – Pitch (rad)
yaw – Yaw (rad)
Private Functions
-
virtual void setStaticTransform_(const geometry_msgs::msg::TransformStamped &transformStamped)
Set the Static Transform in TF.
- Parameters:
transformStamped – TransformStamped message
-
virtual void setStaticTransform(const geometry_msgs::msg::TransformStamped &transformStamped)
-
class TrajectoryMotion : public as2::motionReferenceHandlers::BasicMotionReferenceHandler
- #include <trajectory_motion.hpp>
The TrajectoryMotion class is a motion reference handler that sends a puntual trajectory reference to the robot. The trajectory point is given by a position, a yaw angle, a velocity and a acceleration.
Public Functions
-
explicit TrajectoryMotion(as2::Node *node_ptr, const std::string &ns = "")
TrajectoryMotion constructor.
- Parameters:
node – as2::Node pointer.
-
inline ~TrajectoryMotion()
TrajectoryMotion destructor.
-
bool sendTrajectoryCommandWithYawAngle(const std::string &frame_id, const double x, const double y, const double z, const double yaw_angle, const double vx, const double vy, const double vz, const double ax, const double ay, const double az)
sendTrajectoryCommandWithYawAngle sends a trajectory command to the robot.
- Parameters:
frame_id – frame id of trayectory point.
x – x coordinate of the trajectory point.
y – y coordinate of the trajectory point.
z – z coordinate of the trajectory point.
yaw_angle – yaw angle of the trajectory point.
vx – x velocity of the trajectory point.
vy – y velocity of the trajectory point.
vz – z velocity of the trajectory point.
ax – x acceleration of the trajectory point.
ay – y acceleration of the trajectory point.
az – z acceleration of the trajectory point.
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendTrajectoryCommandWithYawAngle(const std::string &frame_id, const double yaw_angle, const std::vector<double> &positions, const std::vector<double> &velocities, const std::vector<double> &accelerations)
sendTrajectoryCommandWithYawAngle sends a trajectory command to the robot.
- Parameters:
frame_id – frame id of trayectory point.
yaw_angle – yaw angle of the trajectory point.
positions – vector of positions of the trajectory point (x,y,z).
velocities – vector of velocities of the trajectory point (vx,vy,vz).
accelerations – vector of accelerations of the trajectory point (ax,ay,az).
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendTrajectoryCommandWithYawAngle(const std::string &frame_id, const double yaw_angle, const Eigen::Vector3d &positions, const Eigen::Vector3d &velocities, const Eigen::Vector3d &accelerations)
sendTrajectoryCommandWithYawAngle sends a trajectory command to the robot.
- Parameters:
frame_id – frame id of trayectory point.
yaw_angle – yaw angle of the trajectory point.
positions – vector of positions of the trajectory point (x,y,z).
velocities – vector of velocities of the trajectory point (vx,vy,vz).
accelerations – vector of accelerations of the trajectory point (ax,ay,az).
- Returns:
true if the command was sent successfully, false otherwise.
-
bool sendTrajectorySetpoints(const as2_msgs::msg::TrajectorySetpoints &trajectory_setpoints)
sendTrajectorySetpoints sends a trajectory setpoints message to the robot.
- Parameters:
trajectory_setpoints – trajectory setpoints message.
- Returns:
true if the command was sent successfully, false otherwise.
-
explicit TrajectoryMotion(as2::Node *node_ptr, const std::string &ns = "")
-
struct UAV_command
-
struct UAV_reference
-
struct UAV_state
-
struct UAV_state
-
class UsbCameraInterface : public as2::Node
Public Functions
-
explicit UsbCameraInterface(const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
Construct a new UsbCameraInterface object.
-
inline ~UsbCameraInterface()
Destroy the UsbCameraInterface object.
-
explicit UsbCameraInterface(const rclcpp::NodeOptions &options = rclcpp::NodeOptions())
-
struct VehicleParameters
- #include <Parameters.hpp>
A struct that holds properties of the vehicle such as mass, inertia and rotor configuration. Gravity is also included even though it’s not a parameter unique to the vehicle.
-
class VoronoiSearcher : public GraphSearcher<DynamicVoronoi>
Public Functions
-
void update_voronoi(const DynamicVoronoi &voronoi)
-
void update_voronoi(const DynamicVoronoi &voronoi)
-
namespace a_star
-
namespace as2
Typedefs
-
using Event = as2_msgs::msg::PlatformStateMachineEvent
Event type.
-
using Rate = as2::rate::GenericRate<std::chrono::system_clock>
-
using WallRate = as2::rate::GenericRate<std::chrono::steady_clock>
Functions
Executes the main loop of the node.
- Parameters:
node – node to execute the main loop
run_function – function to be executed in the main loop. Node frequency must be higher than 0
-
using Event = as2_msgs::msg::PlatformStateMachineEvent
-
namespace control_mode
Functions
-
uint8_t convertAS2ControlModeToUint8t(const as2_msgs::msg::ControlMode &mode)
-
as2_msgs::msg::ControlMode convertUint8tToAS2ControlMode(uint8_t control_mode_uint8t)
-
constexpr uint8_t convertToUint8t(const as2_msgs::msg::ControlMode &mode)
-
constexpr uint8_t convertToUint8t(uint8_t control_mode_uint8t, uint8_t yaw_mode_uint8t, uint8_t reference_frame_uint8t)
-
inline bool compareModes(const uint8_t mode1, const uint8_t mode2, const uint8_t mask = MATCH_ALL)
-
inline bool compareModes(const as2_msgs::msg::ControlMode &mode1, const as2_msgs::msg::ControlMode &mode2, const uint8_t mask = MATCH_ALL)
-
inline bool isUnsetMode(const uint8_t control_mode_uint8t)
-
inline bool isUnsetMode(const as2_msgs::msg::ControlMode &mode)
-
inline bool isHoverMode(const uint8_t control_mode_uint8t)
-
inline bool isHoverMode(const as2_msgs::msg::ControlMode &mode)
-
void printControlMode(const as2_msgs::msg::ControlMode &mode)
-
void printControlMode(uint8_t control_mode_uint8t)
-
uint8_t convertAS2ControlModeToUint8t(const as2_msgs::msg::ControlMode &mode)
-
namespace frame
Functions
-
Eigen::Vector3d transform(const tf2::Quaternion &quaternion, const Eigen::Vector3d &vector)
Apply a quaternion rotation to a vector.
- Parameters:
quaternion – tf2::Quaternion to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transform(const float roll_angle, const float pitch_angle, const float yaw_angle, const Eigen::Vector3d &vector)
Apply a quaternion rotation to a vector.
- Parameters:
roll_angle – Roll angle to apply.
pitch_angle – Pitch angle to apply.
yaw_angle – Yaw angle to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transform(const geometry_msgs::msg::Quaternion &quaternion, const Eigen::Vector3d &vector)
Apply a quaternion rotation to a vector.
- Parameters:
quaternion – geometry_msgs::Quaternion to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transform(const Eigen::Quaterniond &quaternion, const Eigen::Vector3d &vector)
Apply a quaternion rotation to a vector.
- Parameters:
quaternion – Eigen::Quaterniond to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transformInverse(const tf2::Quaternion &quaternion, const Eigen::Vector3d &vector)
Apply a inverse quaternion rotation to a vector.
- Parameters:
quaternion – tf2::Quaternion to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transformInverse(const float roll_angle, const float pitch_angle, const float yaw_angle, const Eigen::Vector3d &vector)
Apply a inverse quaternion rotation to a vector.
- Parameters:
roll_angle – Roll angle to apply.
pitch_angle – Pitch angle to apply.
yaw_angle – Yaw angle to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transformInverse(const geometry_msgs::msg::Quaternion &quaternion, const Eigen::Vector3d &vector)
Apply a inverse quaternion rotation to a vector.
- Parameters:
quaternion – geometry_msgs::Quaternion to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
Eigen::Vector3d transformInverse(const Eigen::Quaterniond &quaternion, const Eigen::Vector3d &vector)
Apply a inverse quaternion rotation to a vector.
- Parameters:
quaternion – Eigen::Quaterniond to apply.
vector – Eigen::Vector3d Vector to rotate.
quaternion – geometry_msgs::msg::Pose with the quaternion to apply.
vector – Eigen::Vector3d Vector to rotate.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
- Returns:
- Returns:
Eigen::Vector3d Rotated vector.
-
void quaternionToEuler(const tf2::Quaternion &quaternion, double &roll, double &pitch, double &yaw)
Convert quaternion to euler angles.
- Parameters:
quaternion – tf2::Quaternion to convert.
roll – double pointer to store roll angle.
pitch – double pointer to store pitch angle.
yaw – double pointer to store yaw angle.
-
void quaternionToEuler(const geometry_msgs::msg::Quaternion &quaternion, double &roll, double &pitch, double &yaw)
Convert quaternion to euler angles.
- Parameters:
quaternion – geometry_msgs::msg::Quaternion to convert.
roll – double pointer to store roll angle.
pitch – double pointer to store pitch angle.
yaw – double pointer to store yaw angle.
-
void quaternionToEuler(const Eigen::Quaterniond &quaternion, double &roll, double &pitch, double &yaw)
Convert quaternion to euler angles.
- Parameters:
quaternion – Eigen::Quaternion to convert.
yaw – double pointer to store yaw angle.
-
void eulerToQuaternion(const double roll, const double pitch, const double yaw, tf2::Quaternion &quaternion)
Convert euler angles to quaternion.
- Parameters:
roll – double roll angle.
pitch – double pitch angle.
yaw – double yaw angle.
quaternion – tf2::Quaternion pointer to store quaternion.
-
void eulerToQuaternion(const double roll, const double pitch, const double yaw, geometry_msgs::msg::Quaternion &quaternion)
Convert euler angles to quaternion.
- Parameters:
roll – double roll angle.
pitch – double pitch angle.
yaw – double yaw angle.
quaternion – geometry_msgs::msg::Quaternion pointer to store quaternion.
-
void eulerToQuaternion(const double roll, const double pitch, const double yaw, Eigen::Quaterniond &quaternion)
Convert euler angles to quaternion.
- Parameters:
roll – double roll angle.
pitch – double pitch angle.
yaw – double yaw angle.
quaternion – Eigen::Quaterniond pointer to store quaternion.
-
double getYawFromQuaternion(const tf2::Quaternion &quaternion)
Convert quaternion to euler angles.
- Parameters:
quaternion – tf2::Quaternion to convert.
yaw – double pointer to store yaw angle.
-
double getYawFromQuaternion(const geometry_msgs::msg::Quaternion &quaternion)
Convert quaternion to euler angles.
- Parameters:
quaternion – geometry_msgs::msg::Quaternion to convert.
yaw – double pointer to store yaw angle.
- Returns:
Double yaw angle.
-
double getYawFromQuaternion(const Eigen::Quaterniond &quaternion)
Convert quaternion to euler angles.
- Parameters:
quaternion – Eigen::Quaternion to convert.
yaw – double pointer to store yaw angle.
- Returns:
Double yaw angle.
-
double getVector2DAngle(const double x, const double y)
Compute the angle between of a given vector in 2D and the unitary vector (1,0).
- Parameters:
x – double x coordinate of the vector.
y – double y coordinate of the vector.
- Returns:
Double yaw angle.
-
double wrapAngle0To2Pi(const double theta)
Wrap angle to [0, 2*pi].
- Parameters:
theta – double angle.
- Returns:
Double wrapped angle.
-
double wrapAnglePiToPi(const double theta)
Wrap angle to [-pi, pi].
- Parameters:
theta – double angle.
- Returns:
Double wrapped angle.
-
double angleMinError(const double theta1, const double theta2)
Compute the minumun angle between two angles. Maximun error is pi.
- Parameters:
theta1 – double first angle.
theta2 – double second angle.
- Returns:
Double yaw difference.
-
Eigen::Vector3d transform(const tf2::Quaternion &quaternion, const Eigen::Vector3d &vector)
-
namespace gps
Functions
-
void Ecef2LatLon(const geometry_msgs::msg::PoseStamped &ps, geographic_msgs::msg::GeoPoseStamped &gps)
Variables
-
static const GeographicLib::Geocentric &earth = GeographicLib::Geocentric::WGS84()
-
static const char global_frame[] = "earth"
-
void Ecef2LatLon(const geometry_msgs::msg::PoseStamped &ps, geographic_msgs::msg::GeoPoseStamped &gps)
-
namespace motionReferenceHandlers
-
namespace rate
-
namespace sensors
Typedefs
-
namespace tf
Functions
-
std::string generateTfName(const std::string &_namespace, const std::string &_frame_name)
Add namespace to the name of the Transform frame id.
- Parameters:
_namespace –
_frame_name –
- Returns:
std::string namespace/frame_id
-
geometry_msgs::msg::TransformStamped getTransformation(const std::string &_frame_id, const std::string &_child_frame_id, double _translation_x, double _translation_y, double _translation_z, double _roll, double _pitch, double _yaw)
Generate a Transform message from translation and rotation in Euler angles.
- Parameters:
_frame_id –
_child_frame_id –
_translation_x –
_translation_y –
_translation_z –
_roll –
_pitch –
_yaw –
- Returns:
geometry_msgs::msg::TransformStamped
-
std::string generateTfName(const std::string &_namespace, const std::string &_frame_name)
-
namespace yaml
Functions
-
YAML::Node find_tag_across_multiple_yaml_files(const std::vector<std::filesystem::path> &yaml_files, const std::string &tag)
-
template<typename T = std::string>
std::vector<T> find_tag_in_yaml_file(const std::filesystem::path &yaml_file, const std::string &tag)
-
YAML::Node find_tag_across_multiple_yaml_files(const std::vector<std::filesystem::path> &yaml_files, const std::string &tag)
-
namespace as2_behavior
-
namespace as2_behavior_tree
-
namespace as2_behaviors_path_planning
-
namespace as2_map_server
Typedefs
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
-
namespace as2_map_server_plugin_base
-
namespace as2_motion_controller_plugin_base
-
namespace as2_names
-
namespace actions
-
namespace behaviors
Variables
-
const char takeoff[] = "TakeoffBehavior"
-
const char gotowaypoint[] = "GoToBehavior"
-
const char followreference[] = "FollowReferenceBehavior"
-
const char followpath[] = "FollowPathBehavior"
-
const char land[] = "LandBehavior"
-
const char trajectorygenerator[] = "TrajectoryGeneratorBehavior"
-
const char takeoff[] = "TakeoffBehavior"
-
namespace behavior
-
namespace controller
-
namespace gps
-
namespace motion_reference
-
namespace platform
Variables
-
const char set_arming_state[] = "set_arming_state"
-
const char set_offboard_mode[] = "set_offboard_mode"
-
const char set_platform_control_mode[] = "set_platform_control_mode"
-
const char takeoff[] = "platform_takeoff"
-
const char land[] = "platform_land"
-
const char set_platform_state_machine_event[] = "platform/state_machine_event"
-
const char list_control_modes[] = "platform/list_control_modes"
-
const char set_arming_state[] = "set_arming_state"
-
namespace topics
-
namespace actuator_command
-
namespace controller
-
namespace follow_target
-
namespace global
-
namespace ground_truth
-
namespace motion_reference
Variables
-
const char thrust[] = "motion_reference/thrust"
-
const char pose[] = "motion_reference/pose"
-
const char twist[] = "motion_reference/twist"
-
const char trajectory[] = "motion_reference/trajectory"
-
const char modify_waypoint[] = "motion_reference/modify_waypoint"
-
const char traj_gen_info[] = "motion_reference/traj_gen_info"
-
const char thrust[] = "motion_reference/thrust"
-
namespace platform
-
namespace self_localization
-
namespace sensor_measurements
Variables
-
const char base[] = "sensor_measurements/"
-
const char imu[] = "sensor_measurements/imu"
-
const char lidar[] = "sensor_measurements/lidar"
-
const char gps[] = "sensor_measurements/gps"
-
const char camera[] = "sensor_measurements/camera"
-
const char battery[] = "sensor_measurements/battery"
-
const char odom[] = "sensor_measurements/odom"
-
const char base[] = "sensor_measurements/"
-
namespace as2_platform_multirotor_simulator
-
namespace as2_rviz_plugins
-
namespace as2_state_estimator
-
namespace as2_state_estimator_plugin_base
-
namespace BT
-
namespace controller_handler
-
namespace controller_manager
-
namespace dc_servo
-
namespace differential_flatness_controller
-
namespace follow_path_base
-
namespace follow_path_plugin_position
-
namespace follow_path_plugin_trajectory
-
namespace force_estimation_behavior
-
namespace gazebo_platform
-
namespace GeographicLib
-
namespace go_to_base
-
namespace go_to_plugin_position
-
namespace go_to_plugin_trajectory
-
namespace gripper_behavior
-
namespace gripper_behavior_plugin_base
-
namespace ground_truth
-
namespace ground_truth_odometry_fuse
-
namespace gz
-
namespace sim
-
namespace GZ_SIM_VERSION_NAMESPACE
-
namespace systems
-
namespace multicopter_control
-
Functions
-
RotorConfiguration loadRotorConfiguration(const EntityComponentManager &_ecm, const sdf::ElementPtr &_sdf, const Model &_model, const Entity &_comLink)
Loads rotor configuration from SDF.
- Parameters:
_ecm – [in] Immutable reference to the entity component manager
_sdf – [in] Pointer to the SDF element of the system
_model – [in] Model to which the system is attached
_comLink – [in] Link associated with the center of mass.
-
void createFrameDataComponents(EntityComponentManager &_ecm, const Entity &_link)
Creates components necessary for obtaining the frame data of the given link.
- Parameters:
_ecm – [in] Mutable reference to the entity component manager
_link – [in] Link on which the components will be created.
-
std::optional<FrameData> getFrameData(const EntityComponentManager &_ecm, const Entity &_link, const NoiseParameters &_noise)
Retrieves the frame data of the given link and applies noise.
- Parameters:
_ecm – [in] Imutable reference to the entity component manager
_link – [in] Link on which the components will be created.
_noise – [in] Noise parameters
-
RotorConfiguration loadRotorConfiguration(const EntityComponentManager &_ecm, const sdf::ElementPtr &_sdf, const Model &_model, const Entity &_comLink)
-
namespace systems
-
namespace indi_controller
Functions
-
template<typename Vector>
Vector sqrt_keep_sign(const Vector &vector) Compute element-wise square root and keep the sign.
This function computes the square root of each element of the input vector and retains the original sign of each element.
- Template Parameters:
Vector – The type of the input vector (Eigen vector type)
- Parameters:
vector – The input vector
- Returns:
Vector The resulting vector with square root of elements and original sign
-
template<typename Vector>
-
namespace land_base
-
namespace land_plugin_platform
-
namespace land_plugin_speed
-
namespace land_plugin_trajectory
-
namespace mass_estimation_behavior
-
namespace mbzirc
-
namespace mocap_pose
-
namespace pid_controller
-
namespace pid_speed_controller
-
namespace Pnpoly
Functions
-
template<typename T>
inline bool isEqual(T a, T b) - Parameters:
a –
b –
- Returns:
true if a and b are (almost - in case of floating points) equal
-
template<typename T>
-
namespace point_gimbal_behavior
-
namespace raw_odometry
-
namespace rclcpp
-
namespace real_sense_interface
-
namespace rviz_common
-
namespace scan2occ_grid
-
namespace std
STL namespace.
-
namespace chrono_literals
-
namespace takeoff_base
-
namespace takeoff_plugin_platform
-
namespace takeoff_plugin_position
-
namespace takeoff_plugin_speed
-
namespace takeoff_plugin_trajectory
-
namespace two_fingers
-
namespace usb_camera_interface
-
namespace utils
Functions
Convert a point to a cell in the occupancy grid.
- Parameters:
point – point to convert
map_info – occupancy grid metadata
target_frame_id – target frame id
tf_buffer – tf buffer
Convert a pose to a cell in the occupancy grid.
- Parameters:
pose – pose to convert
map_info – occupancy grid metadata
target_frame_id – target frame id
tf_buffer – tf buffer
Convert a cell to a point in the map frame.
- Parameters:
cell_x – cell x
cell_y – cell y
map_info – occupancy grid metadata
map_header – occupancy grid header
Convert a cell to a point in the map frame.
- Parameters:
cell – cell to convert
map_info – occupancy grid metadata
map_header – occupancy grid header
-
namespace voronoi
- file as2_platform_gazebo.hpp
- #include <memory>#include <rclcpp/logging.hpp>#include <rclcpp/rclcpp.hpp>#include <std_msgs/msg/bool.hpp>#include <std_srvs/srv/trigger.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/aerial_platform.hpp”#include “as2_core/core_functions.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/utils/control_mode_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/msg/thrust.hpp”#include “as2_msgs/msg/acro.hpp”
Implementation of an Gazebo UAV platform
- Authors
Rafael Pérez Seguí
- file as2_platform_gazebo.cpp
- #include “as2_platform_gazebo.hpp”
Implementation of an Gazebo UAV platform
ROS2 node for gazebo platform
- Authors
Rafael Pérez Seguí
- Authors
Rafael Pérez Seguí
- file as2_platform_gazebo_node.cpp
- #include “as2_platform_gazebo.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file as2_interface.hpp
- #include <string>#include <vector>#include “multirotor_simulator.hpp”#include “as2_core/aerial_platform.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_core/utils/frame_utils.hpp”#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <nav_msgs/msg/odometry.hpp>#include <as2_msgs/msg/trajectory_setpoints.hpp>#include <as2_msgs/msg/trajectory_point.hpp>
As2MultirotorSimulatorInterface class definition
- Authors
Rafael Pérez Seguí
- file as2_platform_multirotor_simulator.hpp
- #include <string>#include <memory>#include <vector>#include <rclcpp/rclcpp.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <geometry_msgs/msg/point.hpp>#include <sensor_msgs/msg/imu.hpp>#include <sensor_msgs/msg/nav_sat_fix.hpp>#include <nav_msgs/msg/odometry.hpp>#include “as2_core/aerial_platform.hpp”#include “as2_core/core_functions.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/sensor.hpp”#include “as2_core/utils/control_mode_utils.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_core/utils/gps_utils.hpp”#include “as2_msgs/msg/control_mode.hpp”#include “as2_msgs/msg/gimbal_control.hpp”#include “as2_interface.hpp”#include “multirotor_simulator.hpp”
MultirotorSimulatorPlatform class definition
- Author
Rafael Perez-Segui r.psegui@upm.es
- file as2_interface.cpp
-
#include “as2_core/core_functions.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_core/utils/control_mode_utils.hpp”
As2MultirotorSimulatorInterface class implementation
- Author
Rafael Perez-Segui r.psegui@upm.es
- file as2_platform_multirotor_simulator.cpp
-
#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_core/utils/control_mode_utils.hpp”
MultirotorSimulatorPlatform class implementation
- Author
Rafael Perez-Segui r.psegui@upm.es
- file as2_platform_multirotor_simulator_node.cpp
-
#include “as2_core/core_functions.hpp”
MultirotorSimulatorPlatform node implementation
- Author
Rafael Perez-Segui r.psegui@upm.es
Functions
-
int main(int argc, char *argv[])
- file arm_service.hpp
- #include <memory>#include <string>#include “as2_behavior_tree/bt_service_node.hpp”#include <std_srvs/srv/set_bool.hpp>
Arm and disarm services implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file echo.hpp
- #include <string>#include “as2_behavior_tree/bt_action_node.hpp”#include “rclcpp/rclcpp.hpp”
Echo implementation as behavior tree node. Just for testing purpouses
Echo implementation as behavior tree node. Just for testing
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file follow_path.hpp
- #include <string>#include <memory>#include <vector>#include “as2_behavior_tree/bt_action_node.hpp”#include “as2_core/names/actions.hpp”#include “as2_msgs/action/follow_path.hpp”#include “as2_msgs/msg/pose_with_id.hpp”#include “as2_msgs/msg/yaw_mode.hpp”
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file get_origin.hpp
- #include <string>#include “as2_behavior_tree/bt_service_node.hpp”#include “as2_msgs/srv/get_origin.hpp”
Get origin implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file go_to_action.hpp
- #include <string>#include <memory>#include “as2_core/names/actions.hpp”#include “as2_msgs/action/go_to_waypoint.hpp”#include “as2_behavior_tree/bt_action_node.hpp”#include “as2_behavior_tree/port_specialization.hpp”#include “geometry_msgs/msg/point_stamped.hpp”
Go to action implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file go_to_gps_action.hpp
- #include <iterator>#include <string>#include <memory>#include “as2_behavior_tree/bt_action_node.hpp”#include “as2_core/names/actions.hpp”#include “as2_msgs/action/go_to_waypoint.hpp”#include “as2_msgs/srv/geopath_to_path.hpp”#include “geometry_msgs/msg/point.hpp”
Go to Gps action implementation as behavior tree node
Go to gps action implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file gps_to_cartesian.hpp
- #include <iterator>#include <string>#include “as2_behavior_tree/bt_service_node.hpp”#include “as2_behavior_tree/port_specialization.hpp”#include “as2_msgs/srv/geopath_to_path.hpp”#include “geometry_msgs/msg/pose.hpp”#include “rclcpp/rclcpp.hpp”
GPS to Cartesian implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file land_action.hpp
- #include <string>#include <memory>#include “as2_core/names/actions.hpp”#include “as2_msgs/action/land.hpp”#include “as2_behavior_tree/bt_action_node.hpp”
Land action implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file offboard_service.hpp
- #include <string>#include <memory>#include “as2_behavior_tree/bt_service_node.hpp”#include <std_srvs/srv/set_bool.hpp>
Offboard service implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file send_event.hpp
- #include <string>#include “as2_behavior_tree/bt_action_node.hpp”#include “std_msgs/msg/string.hpp”
Send event implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file set_origin.hpp
- #include <string>#include “as2_behavior_tree/bt_service_node.hpp”#include “as2_msgs/srv/set_origin.hpp”
Set origin implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file takeoff_action.hpp
- #include <string>#include <chrono>#include <thread>#include <memory>#include “as2_behavior_tree/bt_action_node.hpp”#include “as2_core/names/actions.hpp”#include “as2_msgs/action/takeoff.hpp”
Takeoff action implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file bt_action_node.hpp
- #include <chrono>#include <memory>#include <string>#include <set>#include <rclcpp/executors.hpp>#include <rclcpp/allocator/allocator_common.hpp>#include “behaviortree_cpp/action_node.h”#include “behaviortree_cpp/bt_factory.h”#include “rclcpp_action/rclcpp_action.hpp”
- file bt_service_node.hpp
- #include <memory>#include <string>#include <set>#include <rclcpp/executors.hpp>#include <rclcpp/allocator/allocator_common.hpp>#include “behaviortree_cpp/bt_factory.h”#include “rclcpp/rclcpp.hpp”
- file is_flying_condition.hpp
- #include <string>#include “behaviortree_cpp/condition_node.h”#include “as2_core/names/topics.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”#include “rclcpp/rclcpp.hpp”
Behavior tree node to check if an aircraft is flying
behavior tree node to check if an aircraft is flying
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file wait_for_alert.hpp
- #include <string>#include “behaviortree_cpp/decorator_node.h”#include “as2_msgs/msg/alert_event.hpp”#include “rclcpp/rclcpp.hpp”
Wait for alert implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file wait_for_event.hpp
- #include <string>#include “behaviortree_cpp/decorator_node.h”#include “geometry_msgs/msg/pose.hpp”#include “rclcpp/rclcpp.hpp”#include “std_msgs/msg/string.hpp”
Wait for event implementation as behavior tree node
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file port_specialization.hpp
- #include <vector>#include “behaviortree_cpp/bt_factory.h”#include “geometry_msgs/msg/point_stamped.hpp”#include “geometry_msgs/msg/pose.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “as2_msgs/msg/pose_with_id.hpp”
- Authors
Pedro Arias Pérez Rafael Perez-Segui Miguel Fernández Cortizas
- file arm_service.cpp
- #include “as2_behavior_tree/action/arm_service.hpp”
- file echo.cpp
- #include “as2_behavior_tree/action/echo.hpp”
- file get_origin.cpp
- #include “as2_behavior_tree/action/get_origin.hpp”
- file go_to_action.cpp
- #include “as2_behavior_tree/action/go_to_action.hpp”
- file go_to_gps_action.cpp
-
#include “rclcpp/rclcpp.hpp”
- file gps_to_cartesian.cpp
- file land_action.cpp
- #include “as2_behavior_tree/action/land_action.hpp”
- file offboard_service.cpp
- file send_event.cpp
- #include “as2_behavior_tree/action/send_event.hpp”
- file set_origin.cpp
- #include “as2_behavior_tree/action/set_origin.hpp”
- file takeoff_action.cpp
- #include “as2_behavior_tree/action/takeoff_action.hpp”
- file is_flying_condition.cpp
- file wait_for_alert.cpp
- file wait_for_event.cpp
- file as2_behavior_tree_node.cpp
- #include <behaviortree_cpp/loggers/groot2_publisher.h>#include <behaviortree_cpp/bt_factory.h>#include <behaviortree_cpp/loggers/bt_cout_logger.h>#include <chrono>#include <thread>#include “rclcpp/rclcpp.hpp”#include “as2_behavior_tree/action/arm_service.hpp”#include “as2_behavior_tree/action/echo.hpp”#include “as2_behavior_tree/action/follow_path.hpp”#include “as2_behavior_tree/action/get_origin.hpp”#include “as2_behavior_tree/action/go_to_action.hpp”#include “as2_behavior_tree/action/land_action.hpp”#include “as2_behavior_tree/action/send_event.hpp”#include “as2_behavior_tree/action/set_origin.hpp”#include “as2_behavior_tree/action/takeoff_action.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file behavior_server__class.hpp
- #include <string>#include <memory>#include <as2_behavior/behavior_utils.hpp>#include <as2_core/node.hpp>#include <rclcpp/rclcpp.hpp>#include <rclcpp/service.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include <rclcpp_action/server.hpp>
Class definition for a behavior server.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file behavior_server__impl.hpp
- file as2_basic_behavior.hpp
- #include <chrono>#include <cmath>#include <memory>#include <string>#include “as2_core/aerial_platform.hpp”#include “as2_core/node.hpp”#include “as2_core/sensor.hpp”#include “as2_msgs/msg/thrust.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “geometry_msgs/msg/twist_stamped.hpp”#include “nav_msgs/msg/odometry.hpp”#include “rclcpp_action/rclcpp_action.hpp”#include “sensor_msgs/msg/battery_state.hpp”#include “sensor_msgs/msg/imu.hpp”
Class definition for a basic behavior.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file as2_basic_behavior.hpp
- #include <chrono>#include <cmath>#include <memory>#include <string>#include “as2_core/aerial_platform.hpp”#include “as2_core/node.hpp”#include “as2_core/sensor.hpp”#include “as2_msgs/msg/thrust.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “geometry_msgs/msg/twist_stamped.hpp”#include “nav_msgs/msg/odometry.hpp”#include “rclcpp_action/rclcpp_action.hpp”#include “sensor_msgs/msg/battery_state.hpp”#include “sensor_msgs/msg/imu.hpp”
Aerostack2 basic behavior virtual class header file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file behavior_server.hpp
-
Class definition for a behavior server.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file behavior_utils.hpp
- #include <string>#include <as2_msgs/msg/behavior_status.hpp>#include <rclcpp/rclcpp.hpp>#include <std_srvs/srv/trigger.hpp>
Class definition for behavior utils.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file behavior_client.cpp
- #include “behavior_client.hpp”
Source file for the behavior client.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file behavior_server.cpp
- #include “behavior_server.hpp”
Source file for the behavior server.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file follow_path_base.hpp
- #include <Eigen/Dense>#include <memory>#include <string>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/follow_path.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”
follow_path_base header file
- Authors
Rafael Perez-Segui
- file follow_path_behavior.hpp
- #include <string>#include <memory>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <pluginlib/class_loader.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/follow_path.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “follow_path_base.hpp”
follow_path_behavior header file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file follow_path_plugin_position.cpp
-
#include “as2_msgs/msg/yaw_mode.hpp”#include “follow_path_behavior/follow_path_base.hpp”#include “std_msgs/msg/header.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the follow path behavior position plugin
- Authors
Rafael Perez-Segui
- file follow_path_plugin_trajectory.cpp
- #include <geometry_msgs/msg/point.hpp>#include <std_msgs/msg/header.hpp>#include <std_srvs/srv/trigger.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_msgs/action/generate_polynomial_trajectory.hpp”#include “as2_msgs/msg/pose_with_id.hpp”#include “as2_msgs/msg/yaw_mode.hpp”#include “follow_path_behavior/follow_path_base.hpp”#include “rclcpp/rclcpp.hpp”#include “rclcpp_action/rclcpp_action.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the go to behavior trajectory plugin
- Authors
Rafael Perez-Segui
- file follow_path_behavior.cpp
-
#include “rclcpp_components/register_node_macro.hpp”
follow_path_behavior file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file follow_path_behavior_node.cpp
- #include “as2_core/core_functions.hpp”
follow_path_behavior node file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
Functions
-
int main(int argc, char *argv[])
- file follow_reference_behavior.hpp
- #include <string>#include <memory>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/follow_reference.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”
follow_reference_behavior header file
- Authors
Rafael Perez-Segui Pedro Arias Pérez Javier Melero Deza
- file follow_reference_behavior.cpp
-
#include “rclcpp_components/register_node_macro.hpp”
- file follow_reference_behavior_node.cpp
- #include “as2_core/core_functions.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file go_to_base.hpp
- #include <Eigen/Dense>#include <memory>#include <string>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/go_to_waypoint.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”
Base class for go to plugins header
- Authors
Rafael Perez-Segui
- file go_to_behavior.hpp
- #include <memory>#include <string>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <pluginlib/class_loader.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/go_to_waypoint.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “go_to_base.hpp”
Go to behavior class header file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file go_to_plugin_position.cpp
-
#include “go_to_behavior/go_to_base.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the go to behavior position plugin
- Authors
Rafael Perez-Segui
- file go_to_plugin_trajectory.cpp
- #include <geometry_msgs/msg/point.hpp>#include <std_msgs/msg/header.hpp>#include <std_srvs/srv/trigger.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_msgs/action/generate_polynomial_trajectory.hpp”#include “as2_msgs/msg/pose_with_id.hpp”#include “as2_msgs/msg/yaw_mode.hpp”#include “go_to_behavior/go_to_base.hpp”#include “rclcpp/rclcpp.hpp”#include “rclcpp_action/rclcpp_action.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the go to behavior trajectory plugin
- Authors
Rafael Perez-Segui
- file go_to_behavior.cpp
- #include “go_to_behavior/go_to_behavior.hpp”#include “rclcpp_components/register_node_macro.hpp”
Go to behavior file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file go_to_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “go_to_behavior/go_to_behavior.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file land_base.hpp
- #include <Eigen/Dense>#include <string>#include <memory>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/land.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”
Base class for land plugins header
- Authors
Rafael Perez-Segui
- file land_behavior.hpp
- #include <string>#include <memory>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <pluginlib/class_loader.hpp>#include <std_srvs/srv/set_bool.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/land.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/srv/set_platform_state_machine_event.hpp”#include “land_base.hpp”#include “rclcpp/rclcpp.hpp”
Land behavior class header file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file land_plugin_platform.cpp
- #include <chrono>#include <std_srvs/srv/set_bool.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/services.hpp”#include “land_behavior/land_base.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the land behavior platform plugin
- Authors
Rafael Perez-Segui
- file land_plugin_speed.cpp
- #include “as2_behavior/behavior_server.hpp”#include “land_behavior/land_base.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the land behavior speed plugin
- Authors
Rafael Perez-Segui
- file land_plugin_trajectory.cpp
- #include <geometry_msgs/msg/point.hpp>#include <std_msgs/msg/header.hpp>#include <std_srvs/srv/trigger.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_msgs/action/generate_polynomial_trajectory.hpp”#include “as2_msgs/msg/pose_with_id.hpp”#include “as2_msgs/msg/yaw_mode.hpp”#include “land_behavior/land_base.hpp”#include “rclcpp/rclcpp.hpp”#include “rclcpp_action/rclcpp_action.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the land behavior trajectory plugin
- Authors
Rafael Perez-Segui
- file land_behavior.cpp
- #include “land_behavior/land_behavior.hpp”#include “rclcpp_components/register_node_macro.hpp”
land_behavior file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file land_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “land_behavior/land_behavior.hpp”
land_behavior node file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
Functions
-
int main(int argc, char *argv[])
- file takeoff_base.hpp
- #include <memory>#include <string>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/takeoff.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”
Base class for takeoff plugins
- Authors
Rafael Perez-Segui
- file takeoff_behavior.hpp
- #include <memory>#include <string>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <pluginlib/class_loader.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/takeoff.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/srv/set_platform_state_machine_event.hpp”#include “takeoff_base.hpp”
Takeoff behavior class header file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file takeoff_plugin_platform.cpp
- #include <chrono>#include <std_srvs/srv/set_bool.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/services.hpp”#include “takeoff_behavior/takeoff_base.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the take off behavior platform plugin
- Authors
Rafael Perez-Segui
- file takeoff_plugin_position.cpp
- #include <geometry_msgs/msg/point.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/utils/frame_utils.hpp”#include “takeoff_behavior/takeoff_base.hpp”#include <pluginlib/class_list_macros.hpp>
- file takeoff_plugin_speed.cpp
- #include “as2_behavior/behavior_server.hpp”#include “takeoff_behavior/takeoff_base.hpp”#include <pluginlib/class_list_macros.hpp>
This file contains the implementation of the take off behavior speed plugin
- Authors
Rafael Perez-Segui
- file takeoff_plugin_trajectory.cpp
- #include <geometry_msgs/msg/point.hpp>#include <std_msgs/msg/header.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_msgs/action/generate_polynomial_trajectory.hpp”#include “as2_msgs/msg/pose_with_id.hpp”#include “as2_msgs/msg/yaw_mode.hpp”#include “rclcpp/rclcpp.hpp”#include “rclcpp_action/rclcpp_action.hpp”#include “takeoff_behavior/takeoff_base.hpp”#include <pluginlib/class_list_macros.hpp>
- file takeoff_behavior.cpp
- #include “takeoff_behavior/takeoff_behavior.hpp”#include “rclcpp_components/register_node_macro.hpp”
Takeoff behavior class source file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
- file takeoff_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “takeoff_behavior/takeoff_behavior.hpp”
Takeoffbehavior container main file
- Authors
Rafael Perez-Segui Pedro Arias Pérez
Functions
-
int main(int argc, char *argv[])
- file force_estimation.hpp
- #include <vector>#include <string>#include <sensor_msgs/msg/imu.hpp>#include <std_msgs/msg/float64.hpp>#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_msgs/msg/thrust.hpp”
- file force_estimation_behavior.hpp
- #include <string>#include <memory>#include <vector>#include <rclcpp/rclcpp.hpp>#include <as2_core/names/topics.hpp>#include <as2_core/synchronous_service_client.hpp>#include <as2_behavior/behavior_server.hpp>#include <as2_msgs/msg/thrust.hpp>#include <std_msgs/msg/float64.hpp>#include <sensor_msgs/msg/imu.hpp>#include “as2_msgs/action/force_estimation.hpp”
Declares the force estimation behavior.
Definition the force estimation.
- Authors
Carmen De Rojas Pita-Romero
- file force_estimation.cpp
- file force_estimation_behavior.cpp
-
force_estimation_behavior implementation file.
- Authors
Carmen De Rojas Pita-Romero
- file force_estimation_behavior_node.cpp
- #include “as2_core/core_functions.hpp”
force_estimation_behavior node file.
- Authors
Carmen De Rojas Pita-Romero
Functions
-
int main(int argc, char *argv[])
- file mass_estimation_behavior.hpp
- #include <string>#include <memory>#include <vector>#include <rclcpp/rclcpp.hpp>#include <as2_core/names/topics.hpp>#include <as2_core/synchronous_service_client.hpp>#include <as2_behavior/behavior_server.hpp>#include <as2_msgs/msg/thrust.hpp>#include <std_msgs/msg/float64.hpp>#include <sensor_msgs/msg/imu.hpp>#include “as2_msgs/action/mass_estimation.hpp”
mass_estimation_behavior header file.
- Authors
Carmen De Rojas Pita-Romero Rafael Perez-Segui
- file param_estimation.hpp
- #include <vector>#include <cmath>#include <numeric>#include <iostream>
param_estimation header file.
- Authors
Carmen De Rojas Pita-Romero Rafael Perez-Segui
- file mass_estimation_behavior.cpp
-
mass_estimation_behavior implementation file.
- Authors
Carmen De Rojas Pita-Romero Rafael Perez-Segui
- file mass_estimation_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “mass_estimation_behavior.hpp”
mass_estimation_behavior node file.
- Authors
Carmen De Rojas Pita-Romero Rafael Perez-Segui
Functions
-
int main(int argc, char *argv[])
- file param_estimation.cpp
-
param_estimation source file.
- Authors
Carmen De Rojas Pita-Romero Rafael Perez-Segui
- file cell_node.hpp
- #include <memory>
cell_node header file.
- Authors
Pedro Arias Pérez Miguel Fernandez-Cortizas
- file graph_searcher.hpp
- #include <math.h>#include <iostream>#include <memory>#include <limits>#include <unordered_map>#include <vector>#include “cell_node.hpp”
graph_searcher header file.
- Authors
Pedro Arias Pérez Miguel Fernandez-Cortizas
- file utils.hpp
- #include <tf2/convert.h>#include <tf2_ros/buffer.h>#include <tf2_ros/transform_listener.h>#include <memory>#include <string>#include <geometry_msgs/msg/point_stamped.hpp>#include <nav_msgs/msg/map_meta_data.hpp>#include <nav_msgs/msg/occupancy_grid.hpp>#include <rclcpp/rclcpp.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include “cell_node.hpp”
utils implementation file.
- Authors
Pedro Arias Pérez
- file path_planner_behavior.hpp
- #include <filesystem>#include <memory>#include <string>#include <vector>#include <rclcpp/rclcpp.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_msgs/action/navigate_to_point.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include <pluginlib/class_loader.hpp>#include “visualization_msgs/msg/marker.hpp”#include “tf2_ros/buffer.h”#include “tf2_ros/transform_listener.h”#include “std_srvs/srv/trigger.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_msgs/action/follow_path.hpp”
path_planner_behavior header file.
- Authors
Pedro Arias Pérez Miguel Fernandez-Cortizas
- file path_planner_plugin_base.hpp
- #include <memory>#include <vector>#include <as2_core/node.hpp>#include <as2_behavior/behavior_utils.hpp>#include “as2_msgs/action/navigate_to_point.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “geometry_msgs/msg/point.hpp”#include “tf2_ros/buffer.h”
path_planner_plugin_base header file.
- Authors
Pedro Arias Pérez Miguel Fernandez-Cortizas
- file a_star.hpp
- #include <iostream>#include <memory>#include <string>#include <vector>#include “a_star_searcher.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “nav_msgs/msg/occupancy_grid.hpp”#include “visualization_msgs/msg/marker.hpp”#include “std_msgs/msg/header.hpp”#include “nav_msgs/msg/map_meta_data.hpp”#include “builtin_interfaces/msg/duration.hpp”
a_star header file.
- Authors
Pedro Arias Pérez
- file a_star_algorithm.hpp
- #include <math.h>#include <array>#include <cmath>#include <iostream>#include <memory>#include <limits>#include <unordered_map>#include <utility>#include <vector>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <opencv2/opencv.hpp>
A* algorithm for path planning.
- Authors
Miguel Fernandez-Cortizas, Pedro Arias Pérez
Functions
-
static int convertPointToInt(const cv::Point2i &point)
- file a_star_searcher.hpp
- #include <opencv2/core/types.hpp>#include <opencv2/opencv.hpp>#include “nav_msgs/msg/occupancy_grid.hpp”#include “graph_searcher.hpp”
a_star_searcher header file.
- Authors
Pedro Arias Pérez
- file a_star.cpp
- #include <a_star.hpp>#include <utils.hpp>#include <pluginlib/class_list_macros.hpp>
a_star implementation file.
- Authors
Pedro Arias Pérez
- file a_star_searcher.cpp
- #include “a_star_searcher.hpp”
a_star_searcher implementation file.
- Authors
Pedro Arias Pérez
- file voronoi.hpp
- #include <memory>#include <string>#include <vector>#include “dynamicvoronoi/dynamicvoronoi.h”#include “geometry_msgs/msg/pose_stamped.hpp”#include “nav_msgs/msg/occupancy_grid.hpp”#include “visualization_msgs/msg/marker.hpp”#include “std_msgs/msg/header.hpp”#include “nav_msgs/msg/map_meta_data.hpp”#include “cell_node.hpp”#include “voronoi_searcher.hpp”
voronoi header file.
- Authors
Pedro Arias Pérez
- file voronoi_searcher.hpp
- #include “dynamicvoronoi/dynamicvoronoi.h”#include “graph_searcher.hpp”
voronoi_searcher header file.
- Authors
Pedro Arias Pérez
- file voronoi.cpp
- #include <voronoi.hpp>#include <utils.hpp>#include <pluginlib/class_list_macros.hpp>
voronoi implementation file.
- Authors
Pedro Arias Pérez
- file voronoi_searcher.cpp
- #include <algorithm>#include “voronoi_searcher.hpp”
voronoi_searcher implementation file.
- Authors
Pedro Arias Pérez
- file bucketedqueue.h
- #include <vector>#include <set>#include <queue>#include <assert.h>#include “point.h”#include <map>#include “bucketedqueue.hxx”
- file bucketedqueue.hxx
- #include “bucketedqueue.h”#include “limits.h”#include <stdio.h>#include <stdlib.h>
- file dynamicvoronoi.cpp
- #include “dynamicvoronoi.h”#include <math.h>#include <iostream>
- file dynamicvoronoi.h
- #include <stdlib.h>#include <stdio.h>#include <limits.h>#include <queue>#include “bucketedqueue.h”
- file point.h
Defines
-
INTPOINT
-
INTPOINT
- file path_planner_behavior.cpp
-
#include “as2_core/names/actions.hpp”#include “as2_core/names/topics.hpp”#include “rclcpp_components/register_node_macro.hpp”
path_planner_behavior implementation file.
- Authors
Pedro Arias Pérez Miguel Fernandez-Cortizas
- file path_planner_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “path_planner_behavior.hpp”
path_planner_behavior node file.
- Authors
Pedro Arias Pérez Miguel Fernandez-Cortizas
Functions
-
int main(int argc, char *argv[])
- file gripper_behavior.hpp
- #include <filesystem>#include <memory>#include <string>#include <vector>#include <rclcpp/rclcpp.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include <pluginlib/class_loader.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_msgs/action/gripper_handler.hpp”
- file gripper_behavior_plugin_base.hpp
- #include <memory>#include <vector>#include <string>#include <as2_core/node.hpp>#include <as2_behavior/behavior_utils.hpp>#include “as2_msgs/action/gripper_handler.hpp”
- file dc_servo.hpp
- #include <memory>#include <string>#include “std_msgs/msg/float64.hpp”
- file dc_servo.cpp
- #include “dc_servo/dc_servo.hpp”#include <pluginlib/class_list_macros.hpp>
Functions
-
PLUGINLIB_EXPORT_CLASS(dc_servo::Plugin, gripper_behavior_plugin_base::GripperBase)
-
PLUGINLIB_EXPORT_CLASS(dc_servo::Plugin, gripper_behavior_plugin_base::GripperBase)
- file two_fingers.hpp
- #include <memory>#include <string>#include “std_msgs/msg/float64.hpp”
This file contains the implementation to handler the gripper in gazebo.
- Authors
Carmen De Rojas Pita-Romero
- file two_fingers.cpp
- #include “two_fingers/two_fingers.hpp”#include <pluginlib/class_list_macros.hpp>
Functions
-
PLUGINLIB_EXPORT_CLASS(two_fingers::Plugin, gripper_behavior_plugin_base::GripperBase)
-
PLUGINLIB_EXPORT_CLASS(two_fingers::Plugin, gripper_behavior_plugin_base::GripperBase)
- file as2_gripper_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “gripper_behavior/gripper_behavior.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file gripper_behavior.cpp
- #include “gripper_behavior/gripper_behavior.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/topics.hpp”
gripper_behavior implementation file.
- Authors
Carmen De Rojas Pita-Romero
- file point_gimbal_behavior.hpp
- #include <string>#include <memory>#include <rclcpp/rclcpp.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/node.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_core/utils/frame_utils.hpp”#include <rclcpp_action/rclcpp_action.hpp>#include “as2_msgs/action/point_gimbal.hpp”#include “as2_msgs/msg/gimbal_control.hpp”#include “geometry_msgs/msg/quaternion_stamped.hpp”#include “geometry_msgs/msg/vector3.hpp”#include “geometry_msgs/msg/vector3_stamped.hpp”
Point Gimbal behavior header file.
- Authors
Pedro Arias-Perez, Rafael Perez-Segui
- Copyright
Copyright (c) 2024 Universidad Politécnica de Madrid All Rights Reserved
- file point_gimbal_behavior.cpp
- #include “point_gimbal_behavior.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/utils/frame_utils.hpp”
Point Gimbal behavior implementation file.
- Authors
Pedro Arias-Perez, Rafael Perez-Segui
- Copyright
Copyright (c) 2024 Universidad Politécnica de Madrid All Rights Reserved
- file point_gimbal_behavior_node.cpp
- #include <rclcpp/rclcpp.hpp>#include “point_gimbal_behavior.hpp”
Point Gimbal node file.
- Authors
Pedro Arias-Perez
- Copyright
Copyright (c) 2024 Universidad Politécnica de Madrid All Rights Reserved
Functions
-
int main(int argc, char *argv[])
- file detect_aruco_markers_behavior.hpp
- #include <tf2/LinearMath/Quaternion.h>#include <Eigen/Dense>#include <memory>#include <string>#include <vector>#include <rclcpp/rclcpp.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/custom/cv_bridge.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/sensor.hpp”#include “as2_msgs/action/detect_aruco_markers.hpp”#include “as2_msgs/msg/pose_stamped_with_id.hpp”#include “as2_msgs/msg/pose_stamped_with_id_array.hpp”#include “sensor_msgs/image_encodings.hpp”#include “sensor_msgs/msg/image.hpp”#include <image_transport/image_transport.hpp>#include <opencv2/aruco.hpp>#include <opencv2/calib3d.hpp>
Aruco detector header file.
- Authors
David Perez Saura
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
- file detect_aruco_markers_behavior.cpp
- #include “detect_aruco_markers_behavior.hpp”
Aruco detector implementation file.
- Authors
David Perez Saura
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
- file detect_aruco_markers_behavior_node.cpp
- #include <rclcpp/rclcpp.hpp>#include “detect_aruco_markers_behavior.hpp”
Aruco detector node file.
- Authors
David Perez Saura
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Functions
-
int main(int argc, char *argv[])
- file set_arming_state_behavior.hpp
- #include <chrono>#include <string>#include <memory>#include “as2_behavior/behavior_server.hpp”#include “as2_msgs/action/set_arming_state.hpp”#include “std_srvs/srv/set_bool.hpp”
Class definition for the set arming state behavior.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file set_offboard_mode_behavior.hpp
- #include <chrono>#include <string>#include <memory>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/services.hpp”#include “as2_msgs/action/set_offboard_mode.hpp”#include “std_srvs/srv/set_bool.hpp”
Class definition for the set offboard mode behavior.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file set_arming_state_behavior_main.cpp
- #include <rclcpp/rclcpp.hpp>
Source file for the set arming state behavior main.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
Functions
-
int main(int argc, char **argv)
- file set_offboard_mode_behavior_main.cpp
- #include <rclcpp/rclcpp.hpp>
Source file for the set offboard mode behavior main.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
Functions
-
int main(int argc, char **argv)
- file drone_swarm.hpp
- #include <memory>#include <string>#include <vector>#include <chrono>#include <rclcpp/rclcpp.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “tf2_ros/transform_broadcaster.h”#include “tf2_ros/static_transform_broadcaster.h”#include “geometry_msgs/msg/pose_stamped.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/names/actions.hpp”#include “as2_behavior/behavior_server.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/action/follow_reference.hpp”#include “tf2_ros/transform_listener.h”#include “tf2_ros/buffer.h”#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include “std_srvs/srv/trigger.hpp”#include “as2_core/synchronous_service_client.hpp”
Aerostack2 drone_swarm header file.
- Authors
Carmen De Rojas Pita-Romero
- file swarm_flocking_behavior.hpp
- #include <memory>#include <string>#include <vector>#include <functional>#include <chrono>#include <algorithm>#include <unordered_map>#include <drone_swarm.hpp>#include <rclcpp/rclcpp.hpp>#include <rclcpp_action/rclcpp_action.hpp>#include “as2_behavior/behavior_server.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “as2_msgs/action/swarm_flocking.hpp”#include “as2_msgs/srv/modify_swarm.hpp”#include “as2_msgs/msg/pose_with_id_array.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/utils/frame_utils.hpp”
Aerostack2 swarm_behavior header file.
Aerostack2 swarm_behavior file.
- Authors
Carmen De Rojas Pita-Romero
- file drone_swarm.cpp
- #include <drone_swarm.hpp>
Aerostack2 drone_swarm file.
- Authors
Carmen De Rojas Pita-Romero
- file swarm_flocking_behavior.cpp
- #include <swarm_flocking_behavior.hpp>
- file swarm_flocking_behavior_node.cpp
- #include “as2_core/core_functions.hpp”
Aerostack2 swarm_behavior node.
- Authors
Carmen De Rojas Pita-Romero
Functions
-
int main(int argc, char *argv[])
- file generate_polynomial_trajectory_behavior.hpp
- #include <tf2/LinearMath/Quaternion.h>#include <Eigen/Dense>#include <string>#include <memory>#include <rclcpp/clock.hpp>#include <rclcpp/rclcpp.hpp>#include <std_srvs/srv/set_bool.hpp>#include “as2_behavior/behavior_server.hpp”#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/action/generate_polynomial_trajectory.hpp”#include “as2_msgs/srv/set_speed.hpp”#include “dynamic_trajectory_generator/dynamic_trajectory.hpp”#include “dynamic_trajectory_generator/dynamic_waypoint.hpp”#include “as2_msgs/msg/pose_stamped_with_id_array.hpp”#include “as2_msgs/msg/pose_with_id.hpp”#include “as2_msgs/msg/traj_gen_info.hpp”#include <geometry_msgs/msg/point.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <nav_msgs/msg/odometry.hpp>#include <nav_msgs/msg/path.hpp>#include <std_msgs/msg/float32.hpp>#include <visualization_msgs/msg/marker.hpp>#include <visualization_msgs/msg/marker_array.hpp>
Class definition for the GeneratePolynomialTrajectoryBehavior class.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
Functions
-
void generateDynamicPoint(const as2_msgs::msg::PoseStampedWithID &msg, dynamic_traj_generator::DynamicWaypoint &dynamic_point)
Auxiliar Functions
- file generate_polynomial_trajectory_behavior.cpp
- #include “generate_polynomial_trajectory_behavior.hpp”#include “rclcpp_components/register_node_macro.hpp”
Source file for the GeneratePolynomialTrajectoryBehavior class.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
Functions
-
void generateDynamicPoint(const as2_msgs::msg::PoseStampedWithID &msg, dynamic_traj_generator::DynamicWaypoint &dynamic_point)
Auxiliar Functions
- file generate_polynomial_trajectory_behavior_node.cpp
- #include “as2_core/core_functions.hpp”#include “generate_polynomial_trajectory_behavior.hpp”
Source file for the GeneratePolynomialTrajectoryBehavior node.
- Author
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
Functions
-
int main(int argc, char *argv[])
- file aerial_platform.hpp
- #include <chrono>#include <functional>#include <memory>#include <string>#include <vector>#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/platform_state_machine.hpp”#include “as2_msgs/msg/alert_event.hpp”#include “as2_msgs/msg/control_mode.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/platform_status.hpp”#include “as2_msgs/msg/thrust.hpp”#include “as2_msgs/msg/trajectory_setpoints.hpp”#include “as2_msgs/srv/list_control_modes.hpp”#include “as2_msgs/srv/set_control_mode.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “geometry_msgs/msg/twist_stamped.hpp”#include “nav_msgs/msg/odometry.hpp”#include “as2_core/node.hpp”#include “rclcpp/publisher.hpp”#include “rclcpp/publisher_options.hpp”#include “rclcpp/rclcpp.hpp”#include “std_srvs/srv/set_bool.hpp”#include “utils/control_mode_utils.hpp”#include “utils/yaml_utils.hpp”
Aerostack2 Aerial Platformm class header file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file core_functions.hpp
- #include <memory>#include “as2_core/node.hpp”#include “as2_core/rate.hpp”#include “rclcpp/publisher.hpp”#include “rclcpp/publisher_options.hpp”#include “rclcpp/rclcpp.hpp”#include “rclcpp_lifecycle/lifecycle_node.hpp”
Aerostack2 core functions header file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file actions.hpp
- #include <rclcpp/rclcpp.hpp>
This file contains the definition of the actions that can be performed in aerostack2.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file services.hpp
- #include <rclcpp/rclcpp.hpp>
This file contains the definitions of the services used in aerostack2.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file topics.hpp
- #include <rclcpp/rclcpp.hpp>
- file node.hpp
- #include <chrono>#include <exception>#include <functional>#include <memory>#include <string>#include <utility>#include <rclcpp/create_timer.hpp>#include <rclcpp/timer.hpp>#include “as2_core/rate.hpp”#include “rclcpp/publisher.hpp”#include “rclcpp/publisher_options.hpp”#include “rclcpp/rclcpp.hpp”#include “rclcpp_lifecycle/lifecycle_node.hpp”
Aerostack2 node header file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file platform_state_machine.hpp
- #include <functional>#include <string>#include <vector>#include <memory>#include “as2_core/node.hpp”#include “as2_msgs/msg/platform_state_machine_event.hpp”#include “as2_msgs/msg/platform_status.hpp”#include “as2_msgs/srv/set_platform_state_machine_event.hpp”
Aerostack2 Platform State Machine Header file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file rate.hpp
- #include <chrono>#include <memory>#include <thread>#include “rclcpp/macros.hpp”#include “rclcpp/utilities.hpp”#include “rclcpp/visibility_control.hpp”
ROS2 rate class modified to work with the as2_core namespace and add more functionalities.
- Authors
Miguel Fernández Cortizas
- file sensor.hpp
- #include <tf2_ros/static_transform_broadcaster.h>#include <tf2_ros/transform_broadcaster.h>#include <chrono>#include <functional>#include <memory>#include <string>#include <vector>#include <image_transport/camera_publisher.hpp>#include <opencv2/opencv.hpp>#include <image_transport/image_transport.hpp>#include <rclcpp/publisher.hpp>#include <rclcpp/publisher_options.hpp>#include <rclcpp/rclcpp.hpp>#include <sensor_msgs/msg/battery_state.hpp>#include <sensor_msgs/msg/camera_info.hpp>#include <sensor_msgs/msg/fluid_pressure.hpp>#include <sensor_msgs/msg/image.hpp>#include <sensor_msgs/msg/imu.hpp>#include <sensor_msgs/msg/laser_scan.hpp>#include <sensor_msgs/msg/magnetic_field.hpp>#include <sensor_msgs/msg/nav_sat_fix.hpp>#include <sensor_msgs/msg/range.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <geometry_msgs/msg/quaternion_stamped.hpp>#include <nav_msgs/msg/odometry.hpp>#include “as2_core/custom/cv_bridge.hpp”#include “as2_core/custom/tf2_geometry_msgs.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/utils/tf_utils.hpp”
Sensor class for AS2 header file.
- Authors
Rafael Pérez Seguí David Pérez Saura Miguel Fernández Cortizas Pedro Arias Pérez
- file synchronous_service_client.hpp
- #include <memory>#include <string>#include “as2_core/node.hpp”#include “rclcpp/rclcpp.hpp”
Class for handling synchronous service clients in ROS2 without taking care about the spin() method.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez
- file control_mode_utils.hpp
- #include <yaml-cpp/yaml.h>#include <bitset>#include <filesystem>#include <fstream>#include <iostream>#include <sstream>#include <string>#include <vector>#include “as2_msgs/msg/control_mode.hpp”#include “rclcpp/logging.hpp”
Utility functions for handling control modes over the aerostack2 framework.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file frame_utils.hpp
- #include <math.h>#include <Eigen/Geometry>#include “as2_core/custom/tf2_geometry_msgs.hpp”#include <geometry_msgs/msg/quaternion.hpp>
Aerostack2 frame utils header file.
- Authors
Rafael Pérez Seguí Pedro Arias Pérez
- file gps_utils.hpp
- #include <string>#include <GeographicLib/LocalCartesian.hpp>#include “geographic_msgs/msg/geo_pose_stamped.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “sensor_msgs/msg/nav_sat_fix.hpp”
- file tf_utils.hpp
- #include <tf2/convert.h>#include <tf2/time.h>#include <tf2_ros/create_timer_ros.h>#include <string>#include <utility>#include <memory>#include <geometry_msgs/msg/point_stamped.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/transform_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <geometry_msgs/msg/vector3_stamped.hpp>#include <nav_msgs/msg/path.hpp>#include “as2_core/custom/tf2_geometry_msgs.hpp”#include “as2_core/node.hpp”#include “tf2_ros/buffer.h”#include “tf2_ros/transform_listener.h”
Tranform utilities library header file.
- Authors
David Perez Saura Miguel Fernandez Cortizas Rafael Perez Segui
- file yaml_utils.hpp
- #include <yaml-cpp/yaml.h>#include <bitset>#include <filesystem>#include <fstream>#include <iostream>#include <sstream>#include <string>#include <vector>#include <algorithm>
- file _as2_core_pybind11.cpp
- #include <pybind11/pybind11.h>#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”
- file aerial_platform.cpp
- #include “as2_core/aerial_platform.hpp”
Aerostack2 Aerial Platformm class implementation file.
- Authors
Miguel Fernandez Cortizas
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
- file core_functions.cpp
- #include “core_functions.hpp”
Aerostack2 core functions implementation file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
- file node.cpp
- #include “as2_core/node.hpp”
Aerostack2 node implementation file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file platform_state_machine.cpp
- #include “as2_core/platform_state_machine.hpp”
Aerostack2 Platform State Machine implementation file.
- Authors
Miguel Fernandez Cortizas
- file rate.cpp
- #include “as2_core/rate.hpp”
ROS2 rate class modified to work with the as2_core namespace and add more functionalities.
- Authors
Miguel Fernández Cortizas
- file sensor.cpp
- #include “as2_core/sensor.hpp”
Sensor class for AS2 implementation file.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file control_mode_utils.cpp
- #include “as2_core/utils/control_mode_utils.hpp”#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>
Utility functions for handling control modes over the aerostack2 framework.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file frame_utils.cpp
- #include “as2_core/utils/frame_utils.hpp”
Aerostack2 frame utils functions implementation file.
- Authors
Rafael Pérez Seguí Pedro Arias Pérez
- file gps_utils.cpp
- #include “as2_core/utils/gps_utils.hpp”
- file tf_utils.cpp
- #include “as2_core/utils/tf_utils.hpp”
Tranform utilities library implementation file.
- Authors
David Perez Saura
- file yaml_utils.cpp
- #include “as2_core/utils/yaml_utils.hpp”
Utils for loading YAML files in Aerostack2 implementation.
- Authors
Miguel Fernández Cortizas
- file as2_realsense_interface.hpp
- #include <tf2_ros/static_transform_broadcaster.h>#include <string>#include <vector>#include <memory>#include <rclcpp/rclcpp.hpp>#include “as2_core/node.hpp”#include “as2_core/sensor.hpp”#include “as2_core/utils/tf_utils.hpp”#include <librealsense2/rs.hpp>#include <geometry_msgs/msg/transform_stamped.hpp>#include <geometry_msgs/msg/vector3.hpp>#include “nav_msgs/msg/odometry.hpp”#include “sensor_msgs/msg/imu.hpp”
as2_realsense_interface header file.
- Author
David Perez Saura
- file as2_realsense_interface.cpp
- #include “as2_realsense_interface.hpp”
as2_realsense_interface source file.
- Author
David Perez Saura
- Author
Alejandro Rodríguez Ramos
- file as2_realsense_interface_node.cpp
- #include “as2_core/core_functions.hpp”#include “as2_realsense_interface.hpp”
as2_realsense_interface node file.
- Author
David Perez Saura
Functions
-
int main(int argc, char *argv[])
- file as2_usb_camera_interface.hpp
- #include <tf2/LinearMath/Quaternion.h>#include <vector>#include <memory>#include <string>#include <rclcpp/rclcpp.hpp>#include “as2_core/custom/cv_bridge.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/sensor.hpp”#include “sensor_msgs/image_encodings.hpp”#include “sensor_msgs/msg/image.hpp”#include <image_transport/image_transport.hpp>#include <opencv2/calib3d.hpp>#include <opencv2/highgui.hpp>#include <opencv2/imgproc.hpp>#include <opencv2/opencv.hpp>
Class definition for the USB camera interface node.
Main for the USB camera interface node.
- Authors
David Perez Saura, Miguel Fernandez Cortizas
- file as2_usb_camera_interface.cpp
- #include “as2_usb_camera_interface.hpp”
- file as2_usb_camera_interface_node.cpp
- #include “as2_core/core_functions.hpp”#include “as2_usb_camera_interface.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file map_server.hpp
- #include <filesystem>#include <memory>#include <pluginlib/class_loader.hpp>#include <rclcpp/rclcpp.hpp>#include “as2_core/node.hpp”#include “plugin_base.hpp”
- file plugin_base.hpp
- #include <as2_core/names/topics.hpp>#include <as2_core/node.hpp>
Plugin base class for Map Server node.
- Authors
Pedro Arias Pérez
- file plugin_base.hpp
- #include <tf2_ros/buffer.h>#include <tf2_ros/buffer_interface.h>#include <tf2_ros/static_transform_broadcaster.h>#include <tf2_ros/transform_broadcaster.h>#include <memory>#include <string>#include <rclcpp/rclcpp.hpp>#include <rclcpp/subscription_base.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <nav_msgs/msg/odometry.hpp>#include <as2_core/node.hpp>#include <as2_core/utils/tf_utils.hpp>#include <as2_core/names/topics.hpp>
An state estimation plugin base for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file scan2occ_grid.hpp
- #include <tf2_ros/buffer.h>#include <tf2_ros/transform_listener.h>#include <memory>#include <string>#include <vector>#include <as2_map_server/plugin_base.hpp>#include <geometry_msgs/msg/point_stamped.hpp>#include <nav_msgs/msg/occupancy_grid.hpp>#include <rclcpp/rclcpp.hpp>#include <sensor_msgs/msg/laser_scan.hpp>#include <opencv2/core/types.hpp>#include <opencv2/opencv.hpp>
2d mapping plugin.
- Authors
Pedro Arias Pérez
- file scan2occ_grid.cpp
- #include “scan2occ_grid.hpp”#include <tf2/convert.h>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <pluginlib/class_list_macros.hpp>
2d mapping plugin.
- Authors
Pedro Arias Pérez
- file map_server.cpp
- #include “as2_map_server/map_server.hpp”
- file map_server_node.cpp
- #include “as2_map_server/map_server.hpp”#include “as2_core/core_functions.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file controller_base.hpp
- #include <string>#include <vector>#include <rclcpp/rclcpp.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/node.hpp”#include “as2_msgs/msg/control_mode.hpp”#include “as2_msgs/msg/thrust.hpp”#include “as2_msgs/msg/trajectory_setpoints.hpp”
Declares the as2_motion_controller_plugin_base class which is the base class for all controller plugins.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file controller_handler.hpp
- #include <rcl/time.h>#include <tf2/time.h>#include <message_filters/subscriber.h>#include <message_filters/sync_policies/approximate_time.h>#include <message_filters/time_synchronizer.h>#include <memory>#include <algorithm>#include <chrono>#include <cstdint>#include <fstream>#include <vector>#include <string>#include <rclcpp/clock.hpp>#include <rclcpp/logging.hpp>#include <rclcpp/rate.hpp>#include <rclcpp/service.hpp>#include <rclcpp/timer.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/control_mode_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/msg/control_mode.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/thrust.hpp”#include “as2_msgs/msg/trajectory_setpoints.hpp”#include “as2_msgs/srv/list_control_modes.hpp”#include “as2_msgs/srv/set_control_mode.hpp”#include “controller_base.hpp”
Controller handler class definition.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file controller_manager.hpp
- #include <memory>#include <chrono>#include <filesystem>#include <pluginlib/class_loader.hpp>#include <rclcpp/logging.hpp>#include “as2_core/node.hpp”#include “as2_core/utils/control_mode_utils.hpp”#include “as2_core/utils/yaml_utils.hpp”#include “as2_msgs/msg/controller_info.hpp”#include “controller_handler.hpp”
Controller manager class definition.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file differential_flatness_controller.hpp
- #include <Eigen/Dense>#include <Eigen/Geometry>#include <vector>#include <string>#include <rclcpp/logging.hpp>#include <rclcpp/rclcpp.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/msg/thrust.hpp”#include “as2_msgs/msg/trajectory_setpoints.hpp”#include “as2_motion_controller/controller_base.hpp”
Declares the controller plugin differential flatness.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file differential_flatness_controller.cpp
- #include “differential_flatness_controller.hpp”#include <pluginlib/class_list_macros.hpp>
Differential flatness controller plugin for the Aerostack framework.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file pid_speed_controller.hpp
- #include <chrono>#include <string>#include <vector>#include <memory>#include <rclcpp/logging.hpp>#include <rclcpp/rclcpp.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/utils/control_mode_utils.hpp”#include “as2_core/utils/frame_utils.hpp”#include “as2_core/utils/tf_utils.hpp”#include “as2_msgs/msg/thrust.hpp”#include “as2_msgs/msg/trajectory_setpoints.hpp”#include “as2_motion_controller/controller_base.hpp”#include “pid_controller/pid.hpp”#include “pid_controller/pid_1d.hpp”
- file pid_speed_controller.cpp
- #include “pid_speed_controller.hpp”#include <pluginlib/class_list_macros.hpp>
- file controller_handler.cpp
- #include “as2_motion_controller/controller_handler.hpp”#include <as2_core/utils/tf_utils.hpp>
Controller handler class implementation.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file controller_manager.cpp
- #include “as2_motion_controller/controller_manager.hpp”
Controller manager class implementation.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
- file controller_manager_node.cpp
- #include “as2_core/core_functions.hpp”#include “as2_motion_controller/controller_manager.hpp”
Controller manager node main file.
- Authors
Miguel Fernández Cortizas Rafael Pérez Seguí
Functions
-
int main(int argc, char *argv[])
- file acro_motion.hpp
- #include <string>#include <geometry_msgs/msg/twist_stamped.hpp>#include <geometry_msgs/msg/vector3.hpp>
This file contains the definition of the ACROMotion class.
- Authors
Rafael Pérez Seguí
- file basic_motion_references.hpp
- #include <string>#include <as2_msgs/msg/control_mode.hpp>#include <as2_msgs/msg/thrust.hpp>#include <as2_msgs/msg/controller_info.hpp>#include <as2_msgs/msg/trajectory_setpoints.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/node.hpp”
Virtual class for basic motion references headers.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file hover_motion.hpp
- #include <string>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/node.hpp”
This file contains the definition of the HoverMotion class.
- Authors
Rafael Pérez Seguí Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura
- file position_motion.hpp
- #include <string>#include <as2_core/utils/tf_utils.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/node.hpp”
This file contains the definition of the SpeedMotion class.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file speed_in_a_plane_motion.hpp
- #include <string>#include <as2_core/utils/tf_utils.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/node.hpp”
This file contains the definition of the SpeedInAPlaneMotion class.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file speed_motion.hpp
- #include <string>#include <as2_core/utils/tf_utils.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include “as2_core/node.hpp”
This file contains the definition of the SpeedMotion class.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file trajectory_motion.hpp
- #include <Eigen/Dense>#include <string>#include <vector>#include “as2_core/node.hpp”
this file contains the implementation of the TrajectoryMotion class
this file contains the definition of the TrajectoryMotion class
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file acro_motion.cpp
-
This file contains the implementation of the ACROMotion class.
- Authors
Rafael Pérez Seguí
- file basic_motion_references.cpp
-
#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/synchronous_service_client.hpp”#include “as2_core/utils/control_mode_utils.hpp”#include “as2_msgs/srv/set_control_mode.hpp”
Virtual class for basic motion references implementations.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file hover_motion.cpp
-
This file contains the implementation of the HoverMotion class.
- Authors
Rafael Pérez Seguí Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura
- file position_motion.cpp
-
This file contains the implementation of the PositionMotion class.
This file contains the implementation of the take off behavior position plugin
- Authors
Rafael Perez-Segui
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file speed_in_a_plane_motion.cpp
-
This file contains the implementation of the SpeedInAPlaneMotion class.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file speed_motion.cpp
-
This file contains the implementation of the SpeedMotion class.
- Authors
Miguel Fernández Cortizas Pedro Arias Pérez David Pérez Saura Rafael Pérez Seguí
- file trajectory_motion.cpp
- file acro_bridge.hpp
- #include <iostream>#include <memory>#include <string>#include <gz/msgs.hh>#include <gz/transport.hh>#include <ros_gz_bridge/convert.hpp>#include “rclcpp/rclcpp.hpp”#include <std_msgs/msg/header.hpp>#include “gz/msgs/header.pb.h”#include “gz/msgs/float_v.pb.h”#include “as2_msgs/msg/acro.hpp”
Gazebo bridge ACRO header file.
- Authors
Francisco José Anguita Chamorro
- file azimuth_bridge.hpp
- #include <math.h>#include <iostream>#include <memory>#include <string>#include “rclcpp/publisher.hpp”#include “rclcpp/rclcpp.hpp”#include <as2_core/names/topics.hpp>#include <gz/msgs.hh>#include <gz/transport.hh>#include <ros_gz_bridge/convert.hpp>#include <std_msgs/msg/float32.hpp>
- file gimbal_bridge.hpp
- #include <math.h>#include <iostream>#include <memory>#include <string>#include <as2_core/names/topics.hpp>#include <as2_core/utils/frame_utils.hpp>#include <gz/msgs.hh>#include <gz/transport.hh>#include <rclcpp/clock.hpp>#include <ros_gz_bridge/convert.hpp>#include “as2_msgs/msg/gimbal_control.hpp”#include “rclcpp/publisher.hpp”#include “rclcpp/rclcpp.hpp”
- file gps_bridge.hpp
- #include <iostream>#include <memory>#include <string>#include <as2_core/names/topics.hpp>#include <gz/msgs.hh>#include <gz/transport.hh>#include <ros_gz_bridge/convert.hpp>#include “rclcpp/rclcpp.hpp”#include “sensor_msgs/msg/nav_sat_fix.hpp”
- file ground_truth_bridge.hpp
- #include <iostream>#include <memory>#include <string>#include “rclcpp/publisher.hpp”#include “rclcpp/rclcpp.hpp”#include <as2_core/names/topics.hpp>#include “geometry_msgs/msg/pose_stamped.hpp”#include “geometry_msgs/msg/twist_stamped.hpp”#include <gz/msgs.hh>#include <gz/transport.hh>#include <ros_gz_bridge/convert.hpp>
- file object_tf_broadcaster.hpp
- #include <geometry_msgs/msg/transform_stamped.h>#include <tf2_msgs/msg/tf_message.h>#include <tf2_ros/static_transform_broadcaster.h>#include <tf2_ros/transform_broadcaster.h>#include <iostream>#include <memory>#include <string>#include <gz/msgs.hh>#include <gz/transport.hh>#include <rclcpp/clock.hpp>#include <rclcpp/rclcpp.hpp>#include <ros_gz_bridge/convert.hpp>#include <geometry_msgs/msg/transform_stamped.hpp>
- file set_entity_pose_bridge.hpp
- #include <math.h>#include <memory>#include <string>#include <gz/msgs.hh>#include <gz/transport.hh>#include “rclcpp/publisher.hpp”#include “rclcpp/rclcpp.hpp”#include <ros_gz_bridge/convert.hpp>#include <ros_gz_interfaces/srv/set_entity_pose.hpp>
Set entity pose bridge header file.
- Authors
Javier Melero Deza Pedro Arias Pérez
- file Common.cpp
- #include “Common.hpp”#include <string>#include <gz/common/Console.hh>#include <gz/math/Rand.hh>#include <gz/math/eigen3/Conversions.hh>#include <gz/sim/components/ChildLinkName.hh>#include <gz/sim/components/Joint.hh>#include <gz/sim/components/JointAxis.hh>#include <gz/sim/components/Link.hh>#include <gz/sim/components/Name.hh>#include <gz/sim/components/ParentEntity.hh>#include <gz/sim/components/Pose.hh>#include “gz/sim/components/LinearVelocity.hh”#include “gz/sim/components/AngularVelocity.hh”
- file Common.cpp
- #include “Common.hpp”#include <string>#include <gz/common/Console.hh>#include <gz/math/Rand.hh>#include <gz/math/eigen3/Conversions.hh>#include <gz/sim/components/ChildLinkName.hh>#include <gz/sim/components/Joint.hh>#include <gz/sim/components/JointAxis.hh>#include <gz/sim/components/Link.hh>#include <gz/sim/components/Name.hh>#include <gz/sim/components/ParentEntity.hh>#include <gz/sim/components/Pose.hh>#include “gz/sim/components/LinearVelocity.hh”#include “gz/sim/components/AngularVelocity.hh”
- file Common.hpp
- #include <Eigen/Geometry>#include <optional>#include <vector>#include <sdf/sdf.hh>#include “gz/sim/config.hh”#include “gz/sim/EntityComponentManager.hh”#include “gz/sim/Model.hh”#include “Parameters.hpp”
- file Common.hpp
- #include <Eigen/Geometry>#include <optional>#include <vector>#include <sdf/sdf.hh>#include “gz/sim/config.hh”#include “gz/sim/EntityComponentManager.hh”#include “gz/sim/Model.hh”#include “Parameters.hpp”
- file IndiController.hpp
- #include “PIDController.hpp”
IndiController class definition.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Authors
Rafael Pérez Seguí
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
- file IndiController.hpp
- #include “PIDController.hpp”
IndiController class definition.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Authors
Rafael Pérez Seguí
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
- file INDIControlPlugin.cpp
- #include <gz/msgs/actuators.pb.h>#include <gz/msgs/twist.pb.h>#include <limits>#include <gz/common/Profiler.hh>#include <gz/plugin/Register.hh>#include <gz/transport/Node.hh>#include <gz/math/Inertial.hh>#include <gz/math/Vector3.hh>#include <gz/math/eigen3/Conversions.hh>#include <sdf/sdf.hh>#include “gz/sim/components/Actuators.hh”#include “gz/sim/components/Gravity.hh”#include “gz/sim/components/Inertial.hh”#include “gz/sim/components/Link.hh”#include “gz/sim/components/Model.hh”#include “gz/sim/components/ParentEntity.hh”#include “gz/sim/components/World.hh”#include “gz/sim/Link.hh”#include “gz/sim/Model.hh”#include “INDIControlPlugin.hpp”
Functions
- GZ_ADD_PLUGIN (MulticopterINDIControl, System, MulticopterINDIControl::ISystemConfigure, MulticopterINDIControl::ISystemPreUpdate) GZ_ADD_PLUGIN_ALIAS(MulticopterINDIControl
- file INDIControlPlugin.cpp
- #include <gz/msgs/actuators.pb.h>#include <gz/msgs/twist.pb.h>#include <limits>#include <gz/common/Profiler.hh>#include <gz/plugin/Register.hh>#include <gz/transport/Node.hh>#include <gz/math/Inertial.hh>#include <gz/math/Vector3.hh>#include <gz/math/eigen3/Conversions.hh>#include <sdf/sdf.hh>#include “gz/sim/components/Actuators.hh”#include “gz/sim/components/Gravity.hh”#include “gz/sim/components/Inertial.hh”#include “gz/sim/components/Link.hh”#include “gz/sim/components/Model.hh”#include “gz/sim/components/ParentEntity.hh”#include “gz/sim/components/World.hh”#include “gz/sim/Link.hh”#include “gz/sim/Model.hh”#include “INDIControlPlugin.hpp”
Functions
- IGNITION_ADD_PLUGIN (MulticopterINDIControl, System, MulticopterINDIControl::ISystemConfigure, MulticopterINDIControl::ISystemPreUpdate) IGNITION_ADD_PLUGIN_ALIAS(MulticopterINDIControl
- file INDIControlPlugin.hpp
- #include <gz/msgs/actuators.pb.h>#include <gz/msgs/boolean.pb.h>#include <gz/msgs/float_v.pb.h>#include <gz/msgs/twist.pb.h>#include <Eigen/Geometry>#include <memory>#include <string>#include <vector>#include <gz/transport/Node.hh>#include “gz/sim/System.hh”#include “gz/sim/Link.hh”#include “gz/sim/Model.hh”#include “Common.hpp”#include “IndiController.hpp”
- file INDIControlPlugin.hpp
- #include <gz/msgs/actuators.pb.h>#include <gz/msgs/boolean.pb.h>#include <gz/msgs/float_v.pb.h>#include <gz/msgs/twist.pb.h>#include <Eigen/Geometry>#include <memory>#include <string>#include <vector>#include <gz/transport/Node.hh>#include <gz/sim/System.hh>#include “gz/sim/Link.hh”#include “gz/sim/Model.hh”#include “Common.hpp”#include “IndiController.hpp”
- file Parameters.hpp
- #include <Eigen/Geometry>#include <vector>#include “gz/sim/config.hh”
- file Parameters.hpp
- #include <Eigen/Geometry>#include <vector>#include “gz/sim/config.hh”
- file PIDController.hpp
- #include <math.h>#include <Eigen/Dense>#include <Eigen/Geometry>#include <iostream>#include <limits>
- file PIDController.hpp
- #include <math.h>#include <Eigen/Dense>#include <Eigen/Geometry>#include <iostream>#include <limits>
- file SuctionGripper.cpp
- #include <gz/msgs/contacts.pb.h>#include <gz/plugin/Register.hh>#include <gz/transport/Node.hh>#include <gz/msgs.hh>#include <gz/sim/components.hh>#include <gz/sim/Model.hh>#include “SuctionGripper.hpp”
- file SuctionGripper.hpp
- #include <memory>#include <string>#include <utility>#include <gz/sim/System.hh>
- file acro_bridge.cpp
- #include “as2_gazebo_assets/acro_bridge.hpp”
Gazebo bridge ACRO implementation file.
- Authors
Francisco José Anguita Chamorro
- file acro_bridge_node.cpp
- #include “as2_gazebo_assets/acro_bridge.hpp”
Gazebo bridge ACRO main node file.
- Authors
Francisco José Anguita Chamorro
Functions
-
int main(int argc, char *argv[])
- file azimuth_bridge.cpp
- #include “as2_gazebo_assets/azimuth_bridge.hpp”
- file azimuth_bridge_node.cpp
- #include “as2_gazebo_assets/azimuth_bridge.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file gimbal_bridge.cpp
- #include “as2_gazebo_assets/gimbal_bridge.hpp”
- file gimbal_bridge_node.cpp
- #include “as2_gazebo_assets/gimbal_bridge.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file gps_bridge.cpp
- #include “as2_gazebo_assets/gps_bridge.hpp”
Ignition bridge gps implementation file.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Authors
Pedro Arias Pérez Rafael Pérez Seguí Miguel Fernández Cortizas David Pérez Saura
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
- file gps_bridge_node.cpp
- #include “as2_gazebo_assets/gps_bridge.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file ground_truth_bridge.cpp
- #include “as2_gazebo_assets/ground_truth_bridge.hpp”
Ignition bridge ground truth implementation file.
Gazebo bridge ground truth implementation file.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Authors
Javier Melero Deza Pedro Arias Pérez
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Authors
Pedro Arias Pérez Rafael Pérez Seguí Miguel Fernández Cortizas David Pérez Saura
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
- file ground_truth_bridge_node.cpp
- #include “as2_gazebo_assets/ground_truth_bridge.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file object_tf_broadcaster.cpp
- #include “as2_gazebo_assets/object_tf_broadcaster.hpp”
Ignition bridge tf broadcaster implementation file.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Authors
Javier Melero Deza Pedro Arias Pérez Rafael Pérez Seguí Miguel Fernández Cortizas David Pérez Saura
- Copyright
Copyright (c) 2022 Universidad Politécnica de Madrid All Rights Reserved
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
- file object_tf_broadcaster_node.cpp
- #include “as2_gazebo_assets/object_tf_broadcaster.hpp”
Functions
-
int main(int argc, char *argv[])
-
int main(int argc, char *argv[])
- file set_entity_pose_bridge.cpp
- #include “as2_gazebo_assets/set_entity_pose_bridge.hpp”
Set entity pose bridge implementation file.
- Authors
Javier Melero Deza Pedro Arias Pérez
- file set_entity_pose_bridge_node.cpp
- #include “as2_gazebo_assets/set_entity_pose_bridge.hpp”
Set entity pose bridge node.
- Authors
Javier Melero Deza Pedro Arias Pérez
Functions
-
int main(int argc, char *argv[])
- file as2_state_estimator.hpp
- #include <tf2_ros/buffer.h>#include <tf2_ros/static_transform_broadcaster.h>#include <tf2_ros/transform_broadcaster.h>#include <tf2_ros/transform_listener.h>#include <filesystem>#include <memory>#include <pluginlib/class_loader.hpp>#include <rclcpp/rclcpp.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <nav_msgs/msg/odometry.hpp>#include <as2_core/names/topics.hpp>#include <as2_core/node.hpp>#include <as2_core/utils/frame_utils.hpp>#include <as2_core/utils/tf_utils.hpp>#include “plugin_base.hpp”
An state estimation server for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file ground_truth.hpp
- #include <utility>#include <regex>#include <memory>#include <geographic_msgs/msg/geo_point.hpp>#include <as2_core/names/services.hpp>#include <as2_core/utils/gps_utils.hpp>#include <as2_core/utils/tf_utils.hpp>#include <as2_msgs/srv/get_origin.hpp>#include <as2_msgs/srv/set_origin.hpp>#include “as2_state_estimator/plugin_base.hpp”
An state estimation plugin ground truth for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file ground_truth.cpp
- #include “ground_truth.hpp”#include <pluginlib/class_list_macros.hpp>
An state estimation plugin ground truth for AeroStack2 implementation
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file ground_truth_odometry_fuse.hpp
- #include <Eigen/Geometry>#include <string>#include <utility>#include <memory>#include <rclcpp/rclcpp.hpp>#include <nav_msgs/msg/odometry.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <mocap4r2_msgs/msg/rigid_bodies.hpp>#include <as2_core/names/services.hpp>#include <as2_core/utils/gps_utils.hpp>#include <as2_msgs/srv/get_origin.hpp>#include <as2_msgs/srv/set_origin.hpp>#include “as2_state_estimator/plugin_base.hpp”
An state estimation plugin external odom for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file ground_truth_odometry_fuse.cpp
- #include “ground_truth_odometry_fuse.hpp”#include <pluginlib/class_list_macros.hpp>
An state estimation plugin ground truth and external odom fusion for AeroStack2
- Authors
Rafael Pérez Seguí
- file mocap_pose.hpp
- #include <tf2/LinearMath/Quaternion.h>#include <tf2/LinearMath/Vector3.h>#include <string>#include <vector>#include <mocap4r2_msgs/msg/rigid_bodies.hpp>#include <rclcpp/duration.hpp>#include “as2_state_estimator/plugin_base.hpp”
An state estimation plugin mocap_pose for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file mocap_pose.cpp
- #include “mocap_pose.hpp”#include <pluginlib/class_list_macros.hpp>
An state estimation plugin mocap_pose for AeroStack2 implementation
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file raw_odometry.hpp
- #include <string>#include <utility>#include <memory>#include <rclcpp/rclcpp.hpp>#include <geographic_msgs/msg/geo_point.hpp>#include <geometry_msgs/msg/transform_stamped.hpp>#include <as2_core/names/services.hpp>#include <as2_core/utils/gps_utils.hpp>#include <as2_msgs/srv/get_origin.hpp>#include <as2_msgs/srv/set_origin.hpp>#include “as2_state_estimator/plugin_base.hpp”
An state estimation plugin external odom for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file raw_odometry.cpp
- #include “raw_odometry.hpp”#include <pluginlib/class_list_macros.hpp>
An state estimation plugin external odom for AeroStack2 implementation
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file as2_state_estimator.cpp
- #include “as2_state_estimator.hpp”
An state estimation server for AeroStack2 implementation
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
- file as2_state_estimator_node.cpp
- #include “as2_core/core_functions.hpp”#include “as2_state_estimator.hpp”
Node for the state estimation server for AeroStack2
- Authors
David Pérez Saura Rafael Pérez Seguí Javier Melero Deza Miguel Fernández Cortizas Pedro Arias Pérez
Functions
-
int main(int argc, char **argv)
- file alphanumeric_viewer.hpp
- #include <curses.h>#include <math.h>#include <stdio.h>#include <tf2/utils.h>#include <iostream>#include <sstream>#include <string>#include <rclcpp/rclcpp.hpp>#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_msgs/msg/controller_info.hpp”#include “as2_msgs/msg/platform_info.hpp”#include “as2_msgs/msg/thrust.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “geometry_msgs/msg/twist_stamped.hpp”#include “sensor_msgs/msg/battery_state.hpp”#include “sensor_msgs/msg/imu.hpp”#include “sensor_msgs/msg/nav_sat_fix.hpp”#include “sensor_msgs/msg/temperature.hpp”
Alphanumeric viewer header file.
- Authors
Javier Melero Deza
- Copyright
Copyright (c) 2024 Universidad Politécnica de Madrid All Rights Reserved
- file alphanumeric_viewer.cpp
- #include “alphanumeric_viewer.hpp”
Alphanumeric viewer source file.
- Authors
Javier Melero Deza
- Copyright
Copyright (c) 2024 Universidad Politécnica de Madrid All Rights Reserved
Typedefs
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
- file alphanumeric_viewer_node.cpp
- #include “alphanumeric_viewer.hpp”#include “as2_core/core_functions.hpp”
Alphanumeric viewer node file.
- Authors
Javier Melero Deza
- Copyright
Copyright (c) 2024 Universidad Politécnica de Madrid All Rights Reserved
Functions
-
int main(int argc, char *argv[])
- file teleop_panel.cpp
- #include “teleop_panel.hpp”#include <QHBoxLayout>#include <QLabel>#include <QLineEdit>#include <QPainter>#include <QPushButton>#include <QTimer>#include <QVBoxLayout>#include <stdio.h>#include <memory>#include “pluginlib/class_list_macros.hpp”
- file teleop_panel.hpp
- #include <functional>#include <future>#include <memory>#include <string>#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_msgs/action/land.hpp”#include “as2_msgs/action/takeoff.hpp”#include “as2_msgs/msg/alert_event.hpp”#include “rclcpp/rclcpp.hpp”#include “rviz_common/panel.hpp”#include “std_srvs/srv/set_bool.hpp”#include <rclcpp_action/rclcpp_action.hpp>
- file as2_external_object_to_tf.hpp
- #include <geometry_msgs/msg/transform_stamped.h>#include <tf2/utils.h>#include <tf2_msgs/msg/tf_message.h>#include <tf2_ros/static_transform_broadcaster.h>#include <tf2_ros/transform_broadcaster.h>#include <fstream>#include <iostream>#include <memory>#include <map>#include <vector>#include <string>#include <tuple>#include “as2_msgs/srv/add_static_transform.hpp”#include “as2_msgs/srv/add_static_transform_gps.hpp”#include <geographic_msgs/msg/geo_point.hpp>#include <geometry_msgs/msg/quaternion.hpp>#include <rclcpp/rclcpp.hpp>#include “as2_core/names/actions.hpp”#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/utils/gps_utils.hpp”#include “as2_msgs/srv/get_origin.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “mocap4r2_msgs/msg/rigid_bodies.hpp”#include “sensor_msgs/msg/nav_sat_fix.hpp”#include “std_msgs/msg/float32.hpp”#include “std_msgs/msg/string.hpp”
as2_external_object_to_tf header file.
- Author
Javilinos
- file as2_external_object_to_tf.cpp
- #include “as2_external_object_to_tf.hpp”#include “as2_core/utils/frame_utils.hpp”#include “yaml-cpp/yaml.h”
as2_external_object_to_tf source file.
- Author
Javilinos
Typedefs
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
- file as2_external_object_to_tf_node.cpp
- #include “as2_core/core_functions.hpp”#include “as2_external_object_to_tf.hpp”
as2_external_object_to_tf node file.
- Author
Javilinos
Functions
-
int main(int argc, char *argv[])
- file as2_geozones.hpp
- #include <limits>#include <algorithm>#include <filesystem>#include <fstream>#include <iostream>#include <iterator>#include <memory>#include <string>#include <vector>#include “yaml-cpp/yaml.h”#include “as2_msgs/msg/geozone.hpp”#include “as2_msgs/msg/polygon_list.hpp”#include “as2_msgs/srv/get_geozone.hpp”#include “as2_msgs/srv/set_geozone.hpp”#include <geographic_msgs/msg/geo_point.hpp>#include <rclcpp/qos.hpp>#include <rclcpp/rclcpp.hpp>#include “as2_core/names/services.hpp”#include “as2_core/names/topics.hpp”#include “as2_core/node.hpp”#include “as2_core/utils/gps_utils.hpp”#include “as2_msgs/msg/alert_event.hpp”#include “as2_msgs/srv/get_origin.hpp”#include “geometry_msgs/msg/point32.hpp”#include “geometry_msgs/msg/polygon_stamped.hpp”#include “geometry_msgs/msg/pose_stamped.hpp”#include “nav_msgs/msg/odometry.hpp”#include “sensor_msgs/msg/nav_sat_fix.hpp”#include “std_msgs/msg/int8.hpp”#include “pnpoly.hpp”
as2_geozones header file.
- Author
Javilinos
- file pnpoly.hpp
- #include <cmath>#include <cstdint>#include <algorithm>#include <array>#include <limits>#include <type_traits>#include <vector>#include <ostream>#include <iostream>
- file as2_geozones.cpp
- #include “as2_geozones.hpp”
as2_geozones source file.
- Author
Javilinos
Typedefs
-
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn
- file as2_geozones_node.cpp
- #include “as2_core/core_functions.hpp”#include “as2_geozones.hpp”#include “pnpoly.hpp”
as2_geozones node file.
- Author
Javilinos
Functions
-
int main(int argc, char *argv[])
- file README.md
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behavior/include/as2_behavior/__detail
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behavior/include/as2_behavior/__impl
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/a_star
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/acro_bridge
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/include/as2_behavior_tree/action
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/plugins/action
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_alphanumeric_viewer/include/as2_alphanumeric_viewer
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_alphanumeric_viewer
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behavior/include/as2_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/include/as2_behavior_tree
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/include/as2_behaviors_path_planning
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_perception
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_platform/include/as2_behaviors_platform
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_platform
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_swarm_flocking/include/as2_behaviors_swarm_flocking
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_swarm_flocking
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_trajectory_generation
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core/include/as2_core
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_external_object_to_tf/include/as2_external_object_to_tf
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_external_object_to_tf
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/include/as2_gazebo_assets
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_geozones/include/as2_geozones
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_geozones
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/include/as2_map_server
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/include/as2_motion_controller
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_reference_handlers
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_reference_handlers/include/as2_motion_reference_handlers
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_gazebo
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_gazebo/include/as2_platform_gazebo
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_multirotor_simulator/include/as2_platform_multirotor_simulator
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_multirotor_simulator
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_realsense_interface/include/as2_realsense_interface
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_realsense_interface
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_visualization/as2_rviz_plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/include/as2_state_estimator
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_usb_camera_interface
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_usb_camera_interface/include/as2_usb_camera_interface
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_visualization
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/azimuth_bridge
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/common
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/include/as2_behavior_tree/condition
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/plugins/condition
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/dc_servo/include/dc_servo
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/dc_servo
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/include/as2_behavior_tree/decorator
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/plugins/decorator
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_perception/detect_aruco_markers_behavior/include/detect_aruco_markers_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_perception/detect_aruco_markers_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/differential_flatness_controller
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/differential_flatness_controller/include/differential_flatness_controller
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/voronoi/thirdparty/dynamicvoronoi
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_path_behavior/include/follow_path_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_path_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_reference_behavior/include/follow_reference_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_reference_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/force_estimation_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/force_estimation_behavior/include/force_estimation_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_trajectory_generation/generate_polynomial_trajectory_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_trajectory_generation/generate_polynomial_trajectory_behavior/include/generate_polynomial_trajectory_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/gimbal_bridge
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/go_to_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/go_to_behavior/include/go_to_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/gps_bridge
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/include/gripper_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/ground_truth
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/ground_truth_bridge
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/ground_truth_odometry_fuse
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_platform/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/ground_truth_odometry_fuse/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_swarm_flocking/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_reference_handlers/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_trajectory_generation/generate_polynomial_trajectory_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/ground_truth/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/plugins/scan2occ_grid/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/differential_flatness_controller/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/pid_speed_controller/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_realsense_interface/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_usb_camera_interface/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/go_to_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_alphanumeric_viewer/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/a_star/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/common/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/mass_estimation_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/force_estimation_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/takeoff_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/land_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_external_object_to_tf/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_perception/detect_aruco_markers_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_reference_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_path_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_geozones/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_multirotor_simulator/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_gazebo/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/point_gimbal_behavior/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/mocap_pose/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/two_fingers/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/raw_odometry/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/voronoi/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/dc_servo/include
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/plugins/indi-control
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/plugins/indi-control_ign
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/land_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/land_behavior/include/land_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/mass_estimation_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/mass_estimation_behavior/include/mass_estimation_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/mocap_pose
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core/include/as2_core/names
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/object_tf_broadcaster
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/pid_speed_controller/include/pid_speed_controller
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/pid_speed_controller
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_path_behavior/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/go_to_behavior/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/land_behavior/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/takeoff_behavior/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/point_gimbal_behavior/include/point_gimbal_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/point_gimbal_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/raw_odometry
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/plugins/scan2occ_grid
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src/set_entity_pose_bridge
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/mocap_pose/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_external_object_to_tf/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_utilities/as2_geozones/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_simulation_assets/as2_gazebo_assets/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/raw_odometry/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_alphanumeric_viewer/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_user_interfaces/as2_visualization/as2_rviz_plugins/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/ground_truth_odometry_fuse/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/plugins/ground_truth/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_state_estimator/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/land_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/two_fingers/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/dc_servo/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/voronoi/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/a_star/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/mass_estimation_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_param_estimation/force_estimation_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/takeoff_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/go_to_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_reference_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/follow_path_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behavior_tree/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_multirotor_simulator/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_aerial_platforms/as2_platform_gazebo/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_reference_handlers/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/pid_speed_controller/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_motion_controller/plugins/differential_flatness_controller/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_map_server/plugins/scan2occ_grid/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_usb_camera_interface/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_hardware_drivers/as2_realsense_interface/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_trajectory_generation/generate_polynomial_trajectory_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_swarm_flocking/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_platform/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_perception/detect_aruco_markers_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/point_gimbal_behavior/src
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/takeoff_behavior/include/takeoff_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_motion/takeoff_behavior
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/voronoi/thirdparty
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/two_fingers
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_payload/gripper_behavior/plugins/two_fingers/include/two_fingers
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core/include/as2_core/utils
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_core/src/utils
- dir /__w/aerostack2.github.io/aerostack2.github.io/main/docs/_09_development/_api_documentation/aerostack2/as2_behaviors/as2_behaviors_path_planning/plugins/voronoi
- page Aerostack2
-
Aerostack2
Aerostack2 is a ROS 2 framework developed to create autonomous multi-aerial-robots systems in an easy and powerful way.

Currently is currently developed and tested over ROS 2 humble (over Ubuntu 22.04) .
Versions below 1.0.9 were also developed and tested over ROS 2 galactic (over Ubuntu 20.04), can be found in the branch
EOL/galactic.We also have docker images with Aerostack2 preinstalled in ROS 2 Humble, check it out at Aerostack2 Dockerhub.
Most important features:
Natively developed on ROS 2.
Complete modularity, allowing elements to be changed or interchanged without affecting the rest of the system.
Independence of the aerial platform. Easy Sim2Real deployment.
Project-oriented, allowing to install and use only the necessary packages for the application to be developed.
Swarming orientation.
Please visit the [Aerostack2 Documentation] for a complete documentation.
Installation instructions can be found [here].
Credits
If you use the code in the academic context, please cite:
M. Fernandez-Cortizas, M. Molina, P. Arias-Perez, R. Perez-Segui, D. Perez-Saura, and P. Campoy, 2023, “Aerostack2: A software framework for developing multi-robot aerial systems”, ArXiv DOI 2303.18237.