Keyboard Teleoperation
Introduction
Aerostack2’s keyboard teleoperation interface serves as a multi-purpose control and visualization tool. It is able to send position and speed references to a swarm of drones, ability to select which of the drones is to be controlled, modify the values of the references sent, it has a simple localization window and there is also Aerostack2’s behaviors management mechanisms.
Install dependencies
To install PySimpleGUI package please execute the following command.
pip install PySimpleGUI-4-foss
Interface launch
Example of keyboard teleoperation tool launch command:
ros2 launch as2_keyboard_teleoperation as2_keyboard_teleoperation_launch.py namespace:=drone_sim_0,drone_sim_1,drone_sim_2 use_sim_time:=true
This will open keyboard teleoperation interface for drones with namespace: drone_sim_0, drone_sim_1 and drone_sim_2.
Instructions
When the previous launch command is executed, a window like the following will open:
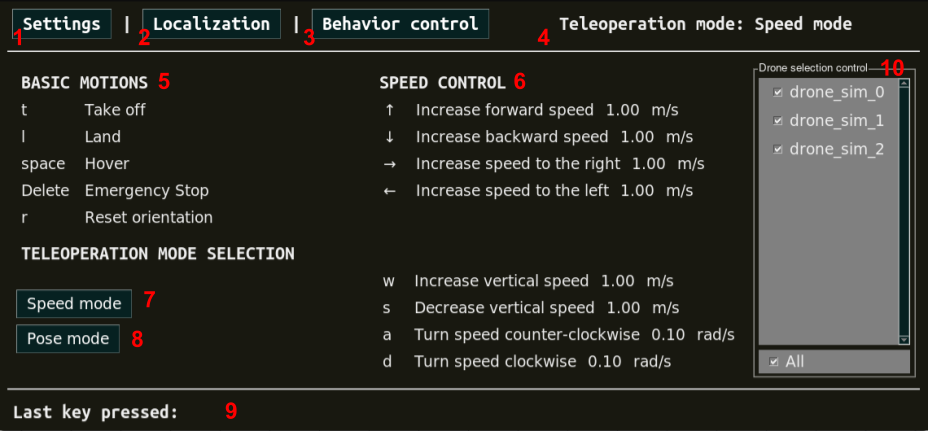
Keyboard teleoperation initial window.
Interface Components
Number |
Component type |
Description |
|---|---|---|
1 |
Settings button |
This button will open Settings window. |
2 |
Localization button |
This button will open Localization window. |
3 |
Behavior control button |
This button will extend main interface with Behavior control mechanisms. |
4 |
Info Area |
Selected control mode. |
5 |
Info Area |
Keyboard keys mapped to basic motions. |
6 |
Info Area |
Keyboard keys mapped to controller references with configured values for each motion type. |
7 |
Speed mode button |
This button will set keyboard teleoperation to speed control mode. |
8 |
Pose mode button |
This button will set keyboard teleoperation to pose control mode. |
9 |
Info Area |
Display of last key pressed. |
10 |
Info Area |
Drone selection control area. |
Settings window
Allows to change values for each motion control. To change a certain motion control type value, write the desired value into the
box and click Save button. Changes will inmediately apply and change into the main window aswell.
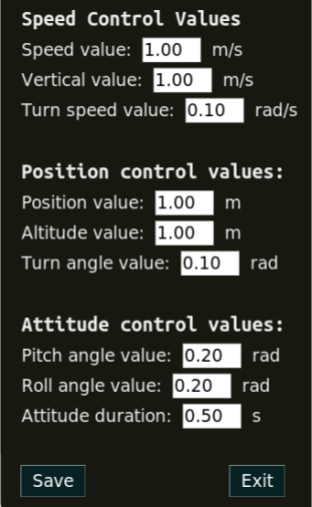
Keyboard teleoperation settings window.
Localization window
Displays position and orientation for each active drone.
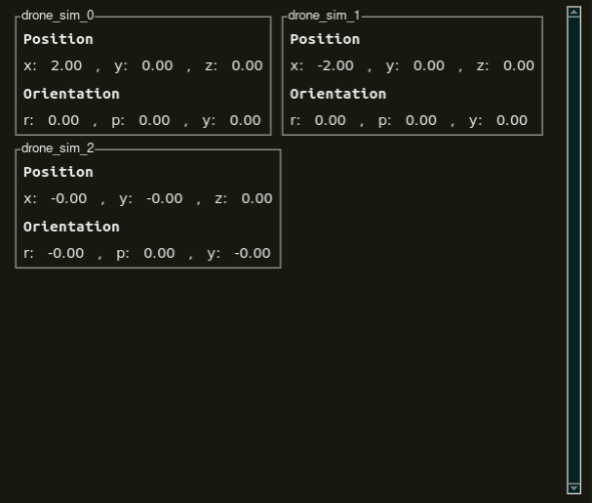
Keyboard teleoperation localization window.
Behavior control
This extension provides the user with mechanisms to pause and resume externally executed Aerostack2’s behaviors regarding the active drones.
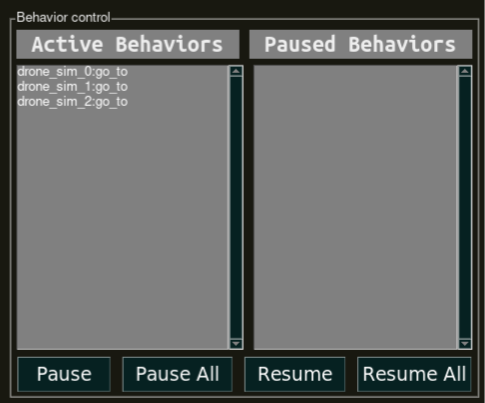
Keyboard teleoperation behavior control section.
In order to be able to pause behaviors, these behaviors must have been activated from other source (see: python_api). When these behaviors
are activated, they will appear in the Active Behaviors section. Click on the desired behaviors and then press Pause button to pause them. When
pressing on Pause all, all the active behaviors will be stopped simultaneously.
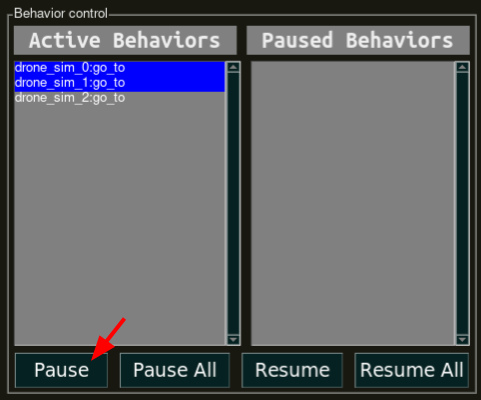
Selecting two behaviors to be paused.
When having paused behaviors, these will appear in the Paused Behaviors section.
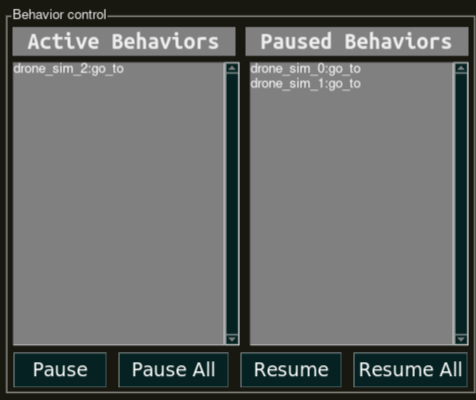
Keyboard teleoperation behavior control section after pausing two behaviors.